二分图相关
定义
二分图又称作二部图,是图论中的一种特殊模型。 设\(G=(V,E)\)是一个无向图,如果顶点\(V\)可分割为两个互不相交的子集\((U,V)\),并且图中的每条边\((i,j)\)所关联的两个顶点\(i\)和\(j\)分别属于这两个不同的顶点集,则称图\(G\)为一个二分图。
一个无向图为二分图的充要条件是没有奇环。
二分图染色
求解算法
思路
判定一个图是否为二分图,使用 dfs 进行黑白染色,判定能否满足每条边的两个顶点异色。
实现
1 |
|
二分图最大匹配
定义
又称最大边独立集,即边数最多的匹配。
有关概念
匹配:又称边独立集,一个边集,满足边集中的任两边不邻接。
极大匹配:又称极大边独立集,本身是匹配,加入任何边就不是。
增广路:连接两个未匹配结点的路径,且已匹配边和未匹配边在路径上交替出现,可以发现非匹配边的数量比匹配边的数量多\(1\),故将路径上的每一条边取反就能使匹配边的数量\(+1\)。
求解算法
匈牙利算法
思路
- 在图中找出增广路;
- 对增广路上每一条边取反(即匹配边改为非匹配边,非匹配边改为匹配边);
- 重复以上两步直到找不到增广路为止。
样例推导
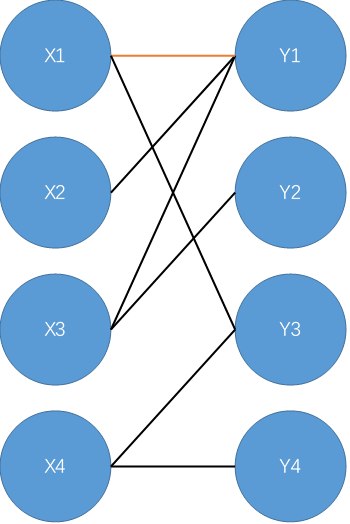
给出二分图:

从\(X1\)开始,找到增广路\(X1-Y1\),标记\(X1-Y1\)为匹配边;
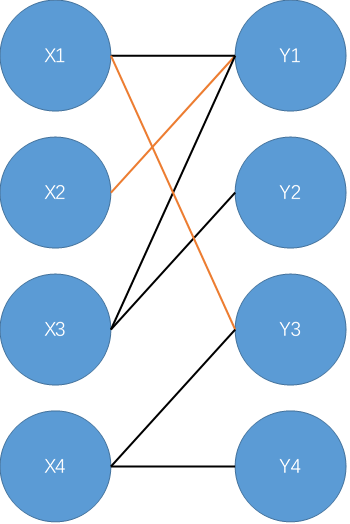
从\(X2\)开始,找到增广路\(X2-Y1-X1-Y3\);

标记\(X1-Y1\)为非匹配边,标记\(X1-Y3,X2-Y1\)为匹配边;
从\(X3\)开始,找到\(X3-Y1-X2\),不是增广路;
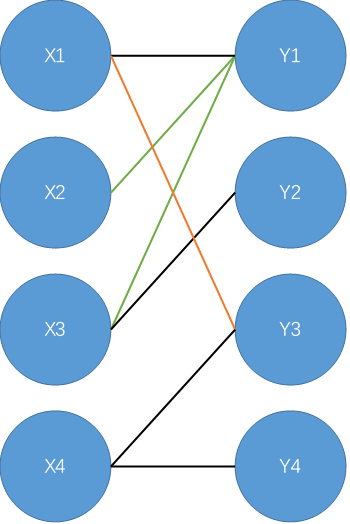
找到增广路\(X3-Y2\),标记\(X3-Y2\)为匹配边;
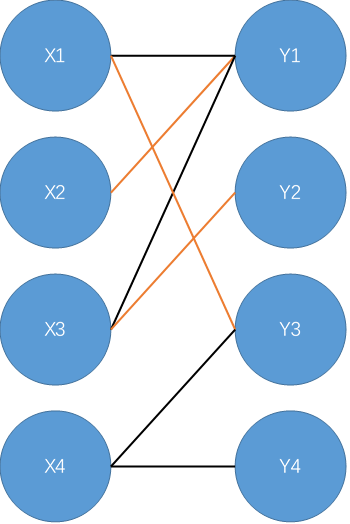
从\(X4\)开始,找到\(X4-Y3-X1-Y1-X2\),不是增广路;
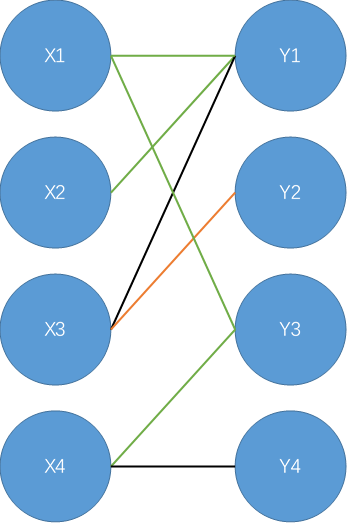
找到增广路\(X4-Y4\),标记\(X4-Y4\)为匹配边。
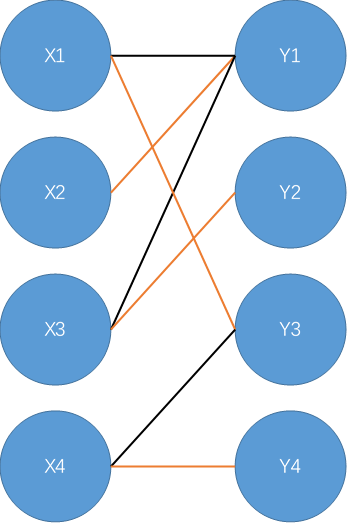
至此找出最大匹配。
实现
1 |
|
网络流解法
思路
建立源点,向\(Xi\)连边,容量为\(1\);
若二分图中有边\(i,j\),则从\(Xi\)向\(Yj\)连边,容量为\(1\);
建立汇点,\(Yi\)向汇点连边,容量为\(1\)。
使用最大流算法解决。
二分图最小点覆盖
定义
点数最少的点覆盖。
有关概念
点覆盖:一个点集,满足所有边至少有一个端点在集合里。
极小点覆盖:本身是点覆盖,其所有真子集都不是。
求解算法
König 定理:最小点覆盖大小=最大匹配数。
首先,二分图最大匹配满足图中没有增广路;
假设最大匹配数为\(n\),则\(X\)部和\(Y\)部都各有\(n\)个匹配点,覆盖了\(n\)个匹配边;
对于非匹配边,若它的两个端点都是非匹配点,那么这条非匹配边成一个增广路,和二分图最大匹配的性质不符,故非匹配边的两个顶点一定是一个匹配点和一个非匹配点,或者两个匹配点,于是这个非匹配边一定会被匹配点覆盖;
故\(X\)部的\(n\)个匹配点或\(Y\)部的\(n\)个匹配点都可以覆盖所有边,故最小点覆盖大小为\(n\)。
二分图最大独立集
定义
点数最多的独立集。
有关概念
独立集:一个点集,集合中任意两个点不相邻。
极大独立集:本身是独立集,再加入任何点就不是。
求解算法
最大独立集大小=总点数-最大匹配数。
可以用上面的结论:非匹配边的两个顶点一定不会都是未匹配点,故不存在两个非匹配点之间有边,故非匹配点构成独立集;
又有不存在增广路能使最大匹配数变大而使这个独立集变小,故这个独立集是最大独立集。
二分图最大团
定义
点数最多的团。
有关概念
团:一个点集,集合中任意两个点都相邻,对于二分图来说,我们默认\(X\)部的每个点之间和\(Y\)部的每个点之间都有边,故二分图的团是在\(X\)部找一个点集\(S_x\),在\(Y\)部找一个点集\(S_y\),使得\(S_x\)中的每一个结点和\(S_y\)中的每个结点之间都有边。
补图:包含原图的所有结点,原图中若两个结点\(Xi,Yj\)之间有边,则补图中没有,否则补图中有。
极大团:本身为团,再加入任何点都不是。
求解算法
最大团=补图的最大独立集。
补图中不相邻的两个结点在原图中一定相邻。
二分图最小边覆盖
定义
边数的最小边覆盖。
有关概念
边覆盖:一个边集,使得所有点都与集合中的边邻接。
极小边覆盖:本身是边覆盖,其所有真子集都不是。
求解算法
最小边覆盖大小=总点数-最大匹配数。
首先设最大匹配数为\(n\),总点数为\(m\),每个匹配边可以不重复地覆盖\(2\)个点,故覆盖了\(2n\)个点;
剩下的每条边最多只能覆盖\(1\)个点,故剩下\(m-2n\)个点需要\(m-2n\)条边来覆盖,故最小边覆盖大小为\(m-2n+n=m-n\)。
DAG 最小路径覆盖
定义
用尽量少的不相交简单路径覆盖 DAG 的所有顶点。
有关概念
DAG:有向无环图。
链:一个点集,其中任意两点\(u\)、\(v\)可以到达,要么\(u\)能走到\(v\),要么\(v\)能走到\(u\)。
反链:一个点集,其中任意两点均不可到达。
最大(长)反链:反链中点数最多的一个(=最小路径覆盖数)。
求解算法
思路
由最小路径覆盖数=DAG 的点数-最小路径覆盖的边数。
把原图的所有节点拆成\(Xi\)和\(Yi\),如果 DAG 中存在边\(i,j\)就在二分图中连有向边\(Xi,Yj\),跑二分图匹配。
容易得出最大匹配数就是最小路径覆盖的边数,故最小路径覆盖数=DAG 的点数-最大匹配数。
二分图最大权匹配
定义
若二分图的每条边都有一个权值\(v[i][j]\),求一种完美匹配,使得所有匹配边的权值和最大,记做最优完美匹配。
有关概念
完美匹配:又称完备匹配,匹配了所有点的匹配。
可行顶标:对于二分图的每个点给定一个顶标值,用\(lx[i]\)记录\(X\)部的顶标,用\(ly[i]\)记录\(Y\)部的顶标。对于图中任意一条边\((Xi,Yj)\)满足\(lx[i]+ly[j]\geq v[i][j]\)。
相等子图:原图的一个生成子图,包含原图的所有点,但是只包含\(lx[i]+ly[j]=v[i][j]\)的边(可行边)。
求解算法
KM 算法
思路
定理:如果原图的一个相等子图中包含完美匹配,那么这个匹配就是原图的最佳完美匹配。
初始化\(lx[i]=max{v[i][j]},\quad 1\leq j\leq n\),\(ly[i]=0\),此时满足\(lx[i]+ly[j]\geq v[i][j]\)。
我们通过修改顶标的方式扩大相等子图,寻找完美匹配。
从\(X\)部的每一个点开始增广,保证增广路径上都是可行边:
若能找到一条增广路,这个点完成配对;
否则在当前增广路径上的所有\(X\)部结点顶标减去\(a\),所有\(Y\)部顶标加上\(a\)。
此时有如下四种情况:
- \(Xi\)和\(Yj\)都属于增广路径,\(lx[i]+a+ly[j]-a\)不变,故\((i,j)\)仍然为可行边。
- \(Xi\)和\(Yj\)都不属于增广路径,\(lx[i]+ly[j]\)不变,故\((i,j)\)可行性不变。
- \(Xi\)不属于增广路径,\(Yj\)属于增广路径,\(lx[i]+ly[j]+a\)增大,\((i,j)\)仍然不可能加入相等子图。
- \(Xi\)属于增广路径,\(Yj\)不属于增广路径,\(lx[i]-a+ly[j]\)减小,\((i,j)\)有可能会加入相等子图。
所以进行修改操作后,原来的可行边仍然可行,不可行边有可能加入相等子图。
上述四种情况只有第四种可行性可能发生改变,故取所有第四种情况的边,\(a=\min\{lx[i]+ly[i]-v[i][j]\}\)。
这样就能保证每次都有至少一个边加入相等子图。
实现
1 |
|
网络流解法
思路
建立源点,向\(Xi\)连边,容量为\(1\),费用为\(0\);
若二分图中有边\(i,j\),则从\(Xi\)向\(Yj\)连边,容量为\(INF\),费用为权值的相反数(由于费用流求出的是最小费用);
建立汇点,\(Yi\)向汇点连边,容量为\(1\),费用为\(0\)。
使用费用流算法解决。