计算机系统结构复习笔记 - 第九、十、十三章
转载自 BakaNetwork/ComputerArchitecture - GitHub,有少量修改。
- 互联网络
- 多处理机
- 阵列处理机
第九章 互连网络
重点
互连函数:互连函数的表示方法及基本的互连函数
静态/动态互连网络定义
典型的静态互连网络
典型的动态互连网络:总线网络、交叉开关网络、多机互联网络
互连网络的结构参数与性能指标:网络规模、结点度、距离、直径,等分宽度
消息传递:线路交换和包交换(存储转发,虚拟直通、虫孔方式)
流量控制策略和通信模式
定义:互连网络是开关元件按一定拓扑结构和控制方式构成的网络。用于实现计算机系统中结点之间的相互连接。
三要素:互连结构、开关元件、控制方式。
互连函数
循环表示法:\((x_0x_1x_2 \cdots x_{j-1})\),表示 \(I(x_0x_1x_2 \cdots x_{j-2}x_{j-1}) = x_1x_2x_3 \cdots x_{j-1}x_0\)。\(j\) 称为循环长度。
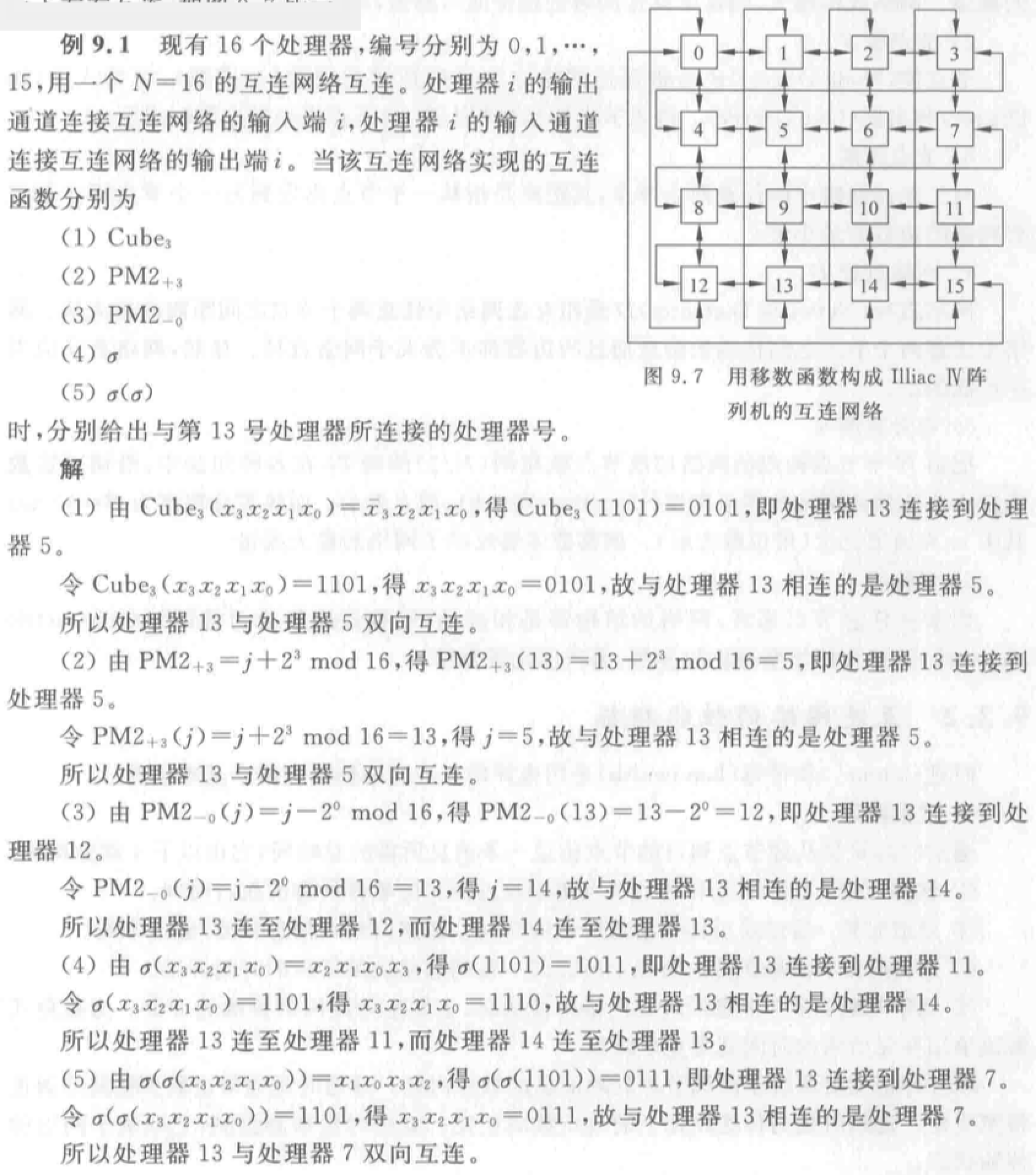
例题

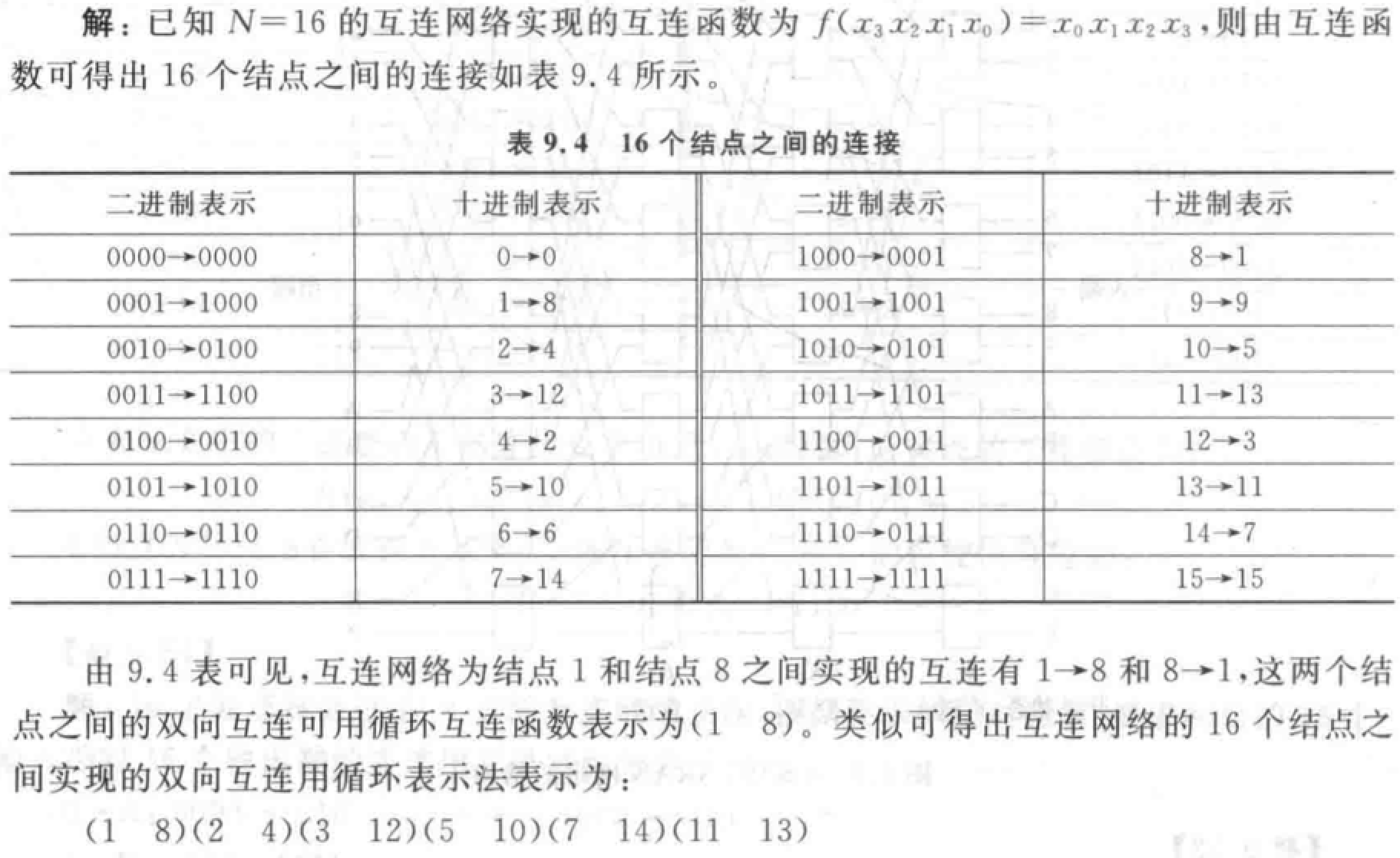
计算互连时算该处理器连接到的处理器、连接到该处理器的处理器。
基本互连函数:
恒等函数:\(I(x_{n-1}x_{n-2}...x_1x_0) = (x_{n-1}x_{n-2}...x_1x_0)\)
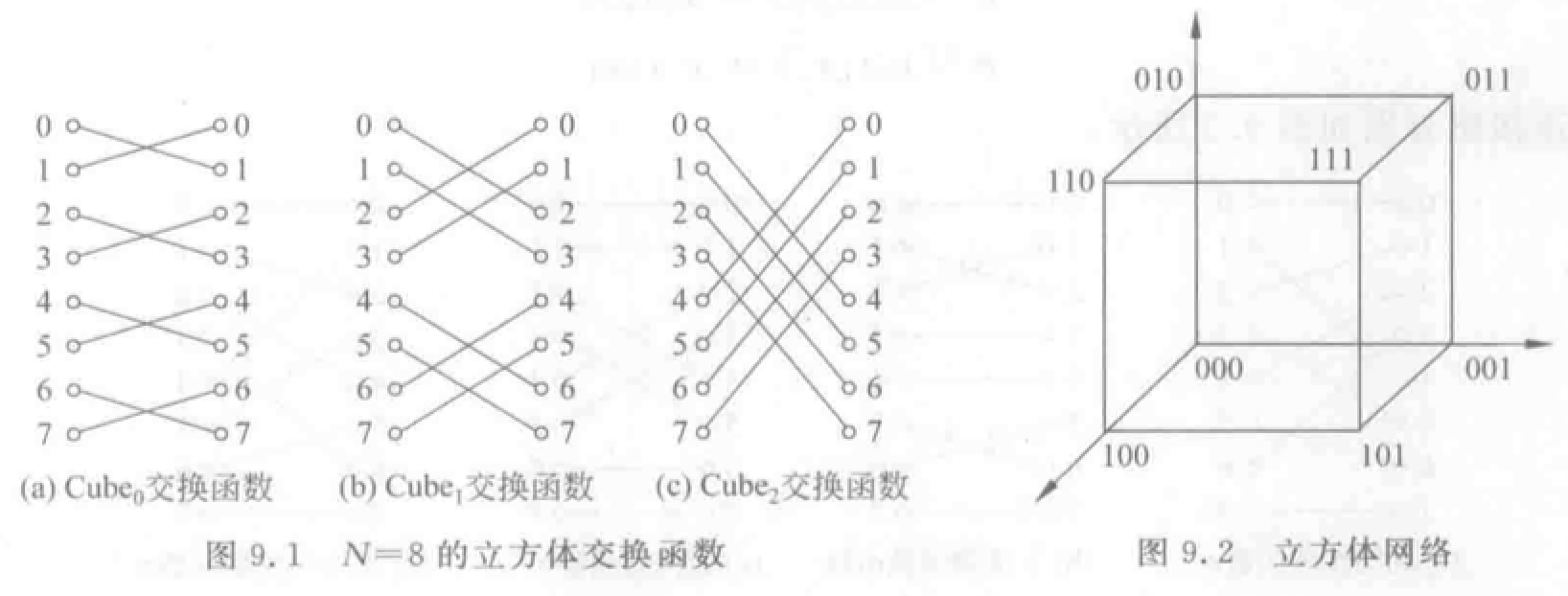
交换函数:用于构造立方体和超立方体互连网络。\(Cube_1(x_{n-1}x_{n-2}...x_1x_0)=x_{n-1}x_{n-2}...\bar{x_1}x_0\) 实现二进制地址编号中第 \(k\) 位互反的输入端和输出端之间的连接。互连函数种类为 \(log_2N\),\(N\) 为结点个数。
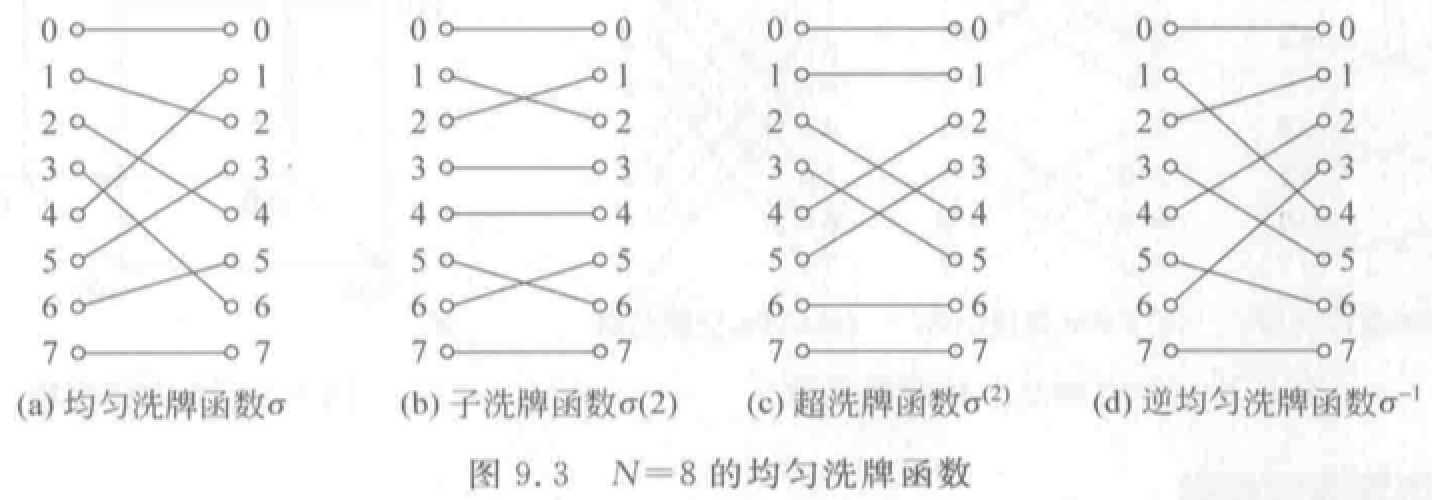
均匀洗牌函数:用于构造 Omega 和逆 Omega 网络。将入线均分,前一部分和后一部分按顺序一个接一个交叉连接。
- 均匀洗牌:\(\sigma(x_{n-1}x_{n-2}...x_1x_0)=x_{n-2}x_{n-3}...x_1x_0x_{n-1}\),将入线二进制地址循环左移一位得到。
- 逆均匀洗牌:\(\sigma(x_{n-1}x_{n-2}...x_1x_0)=x_0x_{n-1}x_{n-2}...x_2x_1\),循环右移。
- 第 \(k\) 个子函数:把互连函数作用于低 \(k\) 位。第 \(k\) 个超函数:把互连函数作用于高 \(k\) 位。
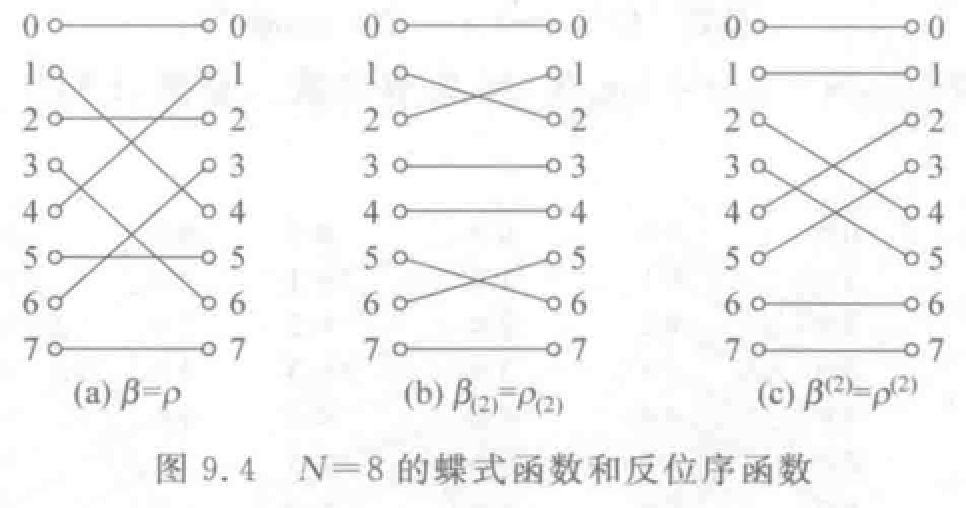
蝶式函数:\(\beta (x_{n-1}x_{n-2}...x_1x_0)=x_0x_{n-2}...x_1x_{n-1}\)。将输入端二进制最高位 \(x_{n-1}\) 与最低位 \(x_0\) 互换位置得到。
反位序函数:\(\rho (x_{n-1}x_{n-2}...x_1x_0)=x_0x_1...x_{n-2}x_{n-1}\),把输入二进制编号各位次序颠倒。
移数函数:\(\alpha (x) = (x \pm k)\mod N\) 把二进制编号模 \(N\)。
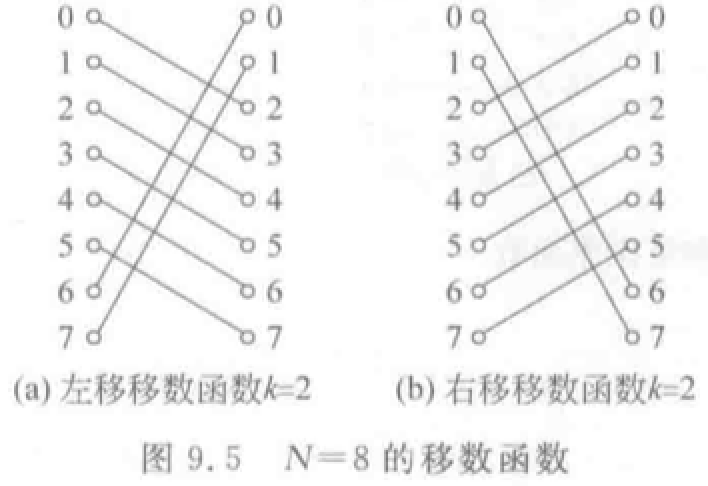
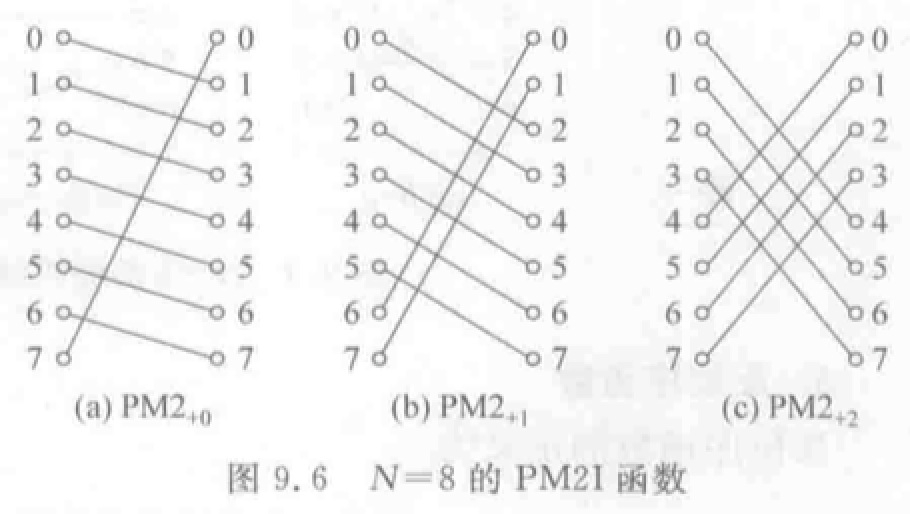
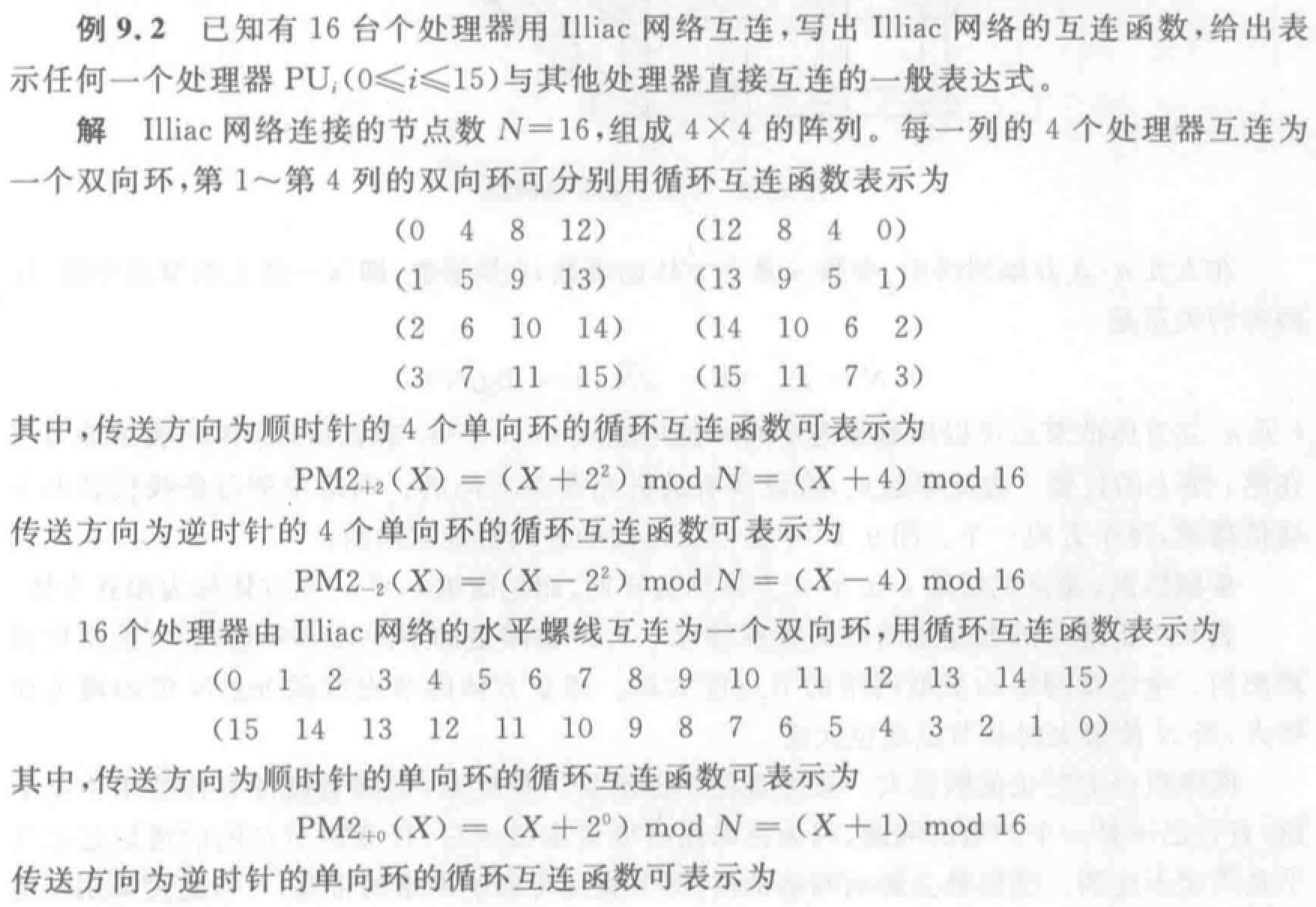
\(PM2I\)函数:加减 \(2^i\)。构成数据变换网络的基础。实质为 1、2、4 个环形网。
- \(PM2_{+i}(x) = (x + 2^i)\mod N\),\(0 \le i \le log_2N\)。
- \(PM2_{-i}(x) = (x - 2^i)\mod N\)
例题
结构参数与性能指标
6 个结构参数:
- 网络规模 \(N\)
- 结点度 \(d\):结点所连接的边数。(入度、出度)
- 结点距离:从一个结点出发到另一个结点,经过边数的最小值。
- 网络直径 \(D\):网络中结点距离的最大值。(越小越好)
- 等分宽度 \(b\):把网络均分为结点数相同的两半,在各种切法中,沿切口边数的最小值。线等分宽度 \(B = b \times w\),\(w\) 为通道宽度(bit),等分宽度反映网络最大流量。
- 对称性:从任意结点看,网络的结构都是相同的。
两类性能指标:时延和带宽
- 时延:
- 通信时延:
- 软件开销:源节点、目的结点收发消息软件的执行时间。取决于软件内核。
- 通道时延:消息长度/通道带宽。通常由瓶颈段带宽决定。
- 选路时延:与传送路径上结点数成正比。
- 竞争时延:避免、解决争用所需的时间。很难预测,取决于网络状态。
- 网络时延:通道时延+选路时延。由网络硬件决定,与软件、传输状态无关。
- 通信时延:
- 带宽
- 端口带宽:单位时间内从该端口传输到其他端口的最大信息量。
- 对称网络中各端口带宽相等=网络端口带宽。
- 非对称网络的端口带宽=所有端口带宽的最小值。
- 聚集带宽:网络从一半节点到另一半节点,单位时间传送的最大信息量。
- 等分带宽:与等分宽度对应的切平面中,所有边合起来,单位时间传送的最大信息量。
- 端口带宽:单位时间内从该端口传输到其他端口的最大信息量。
静态与动态互连网络
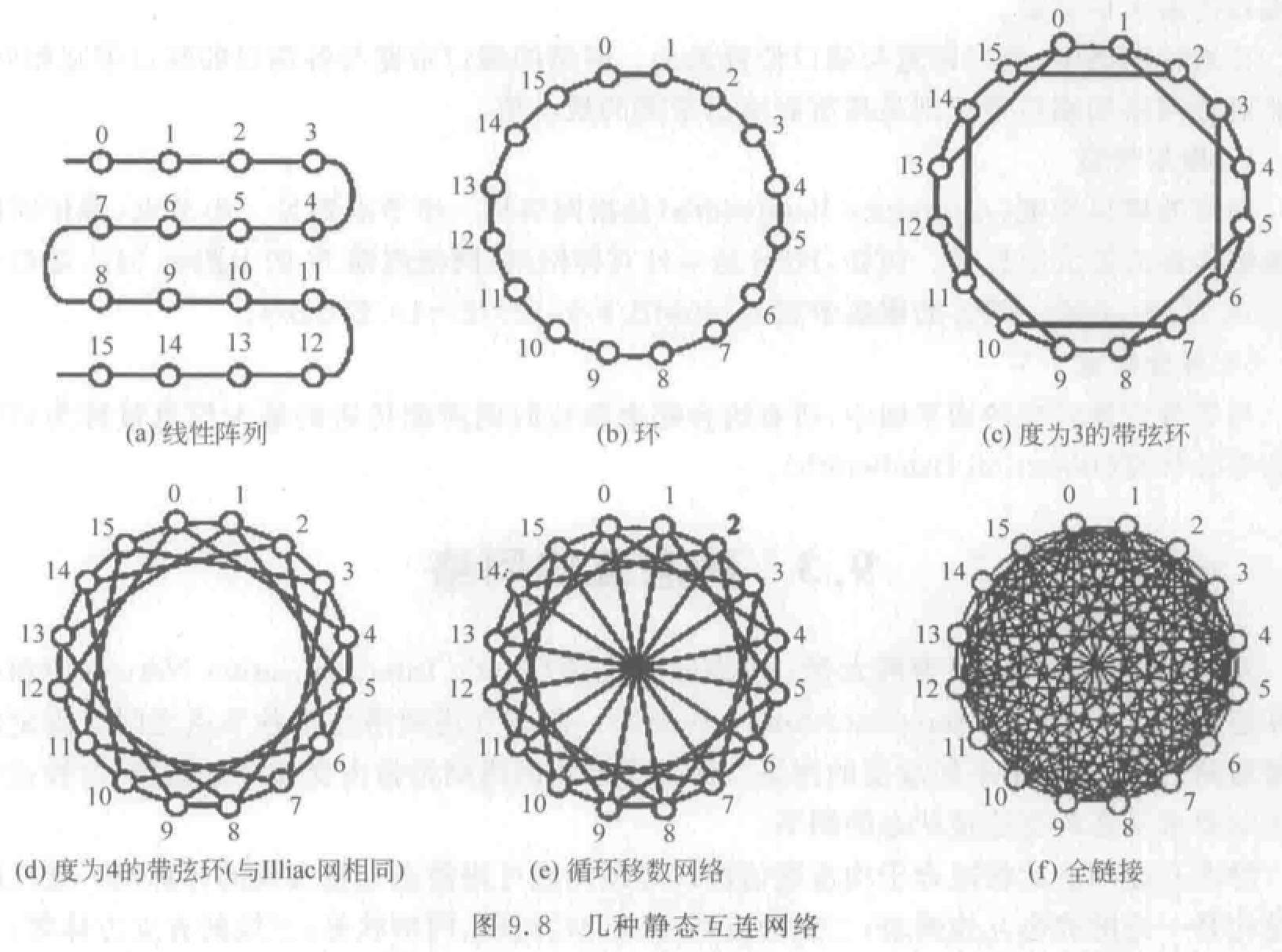
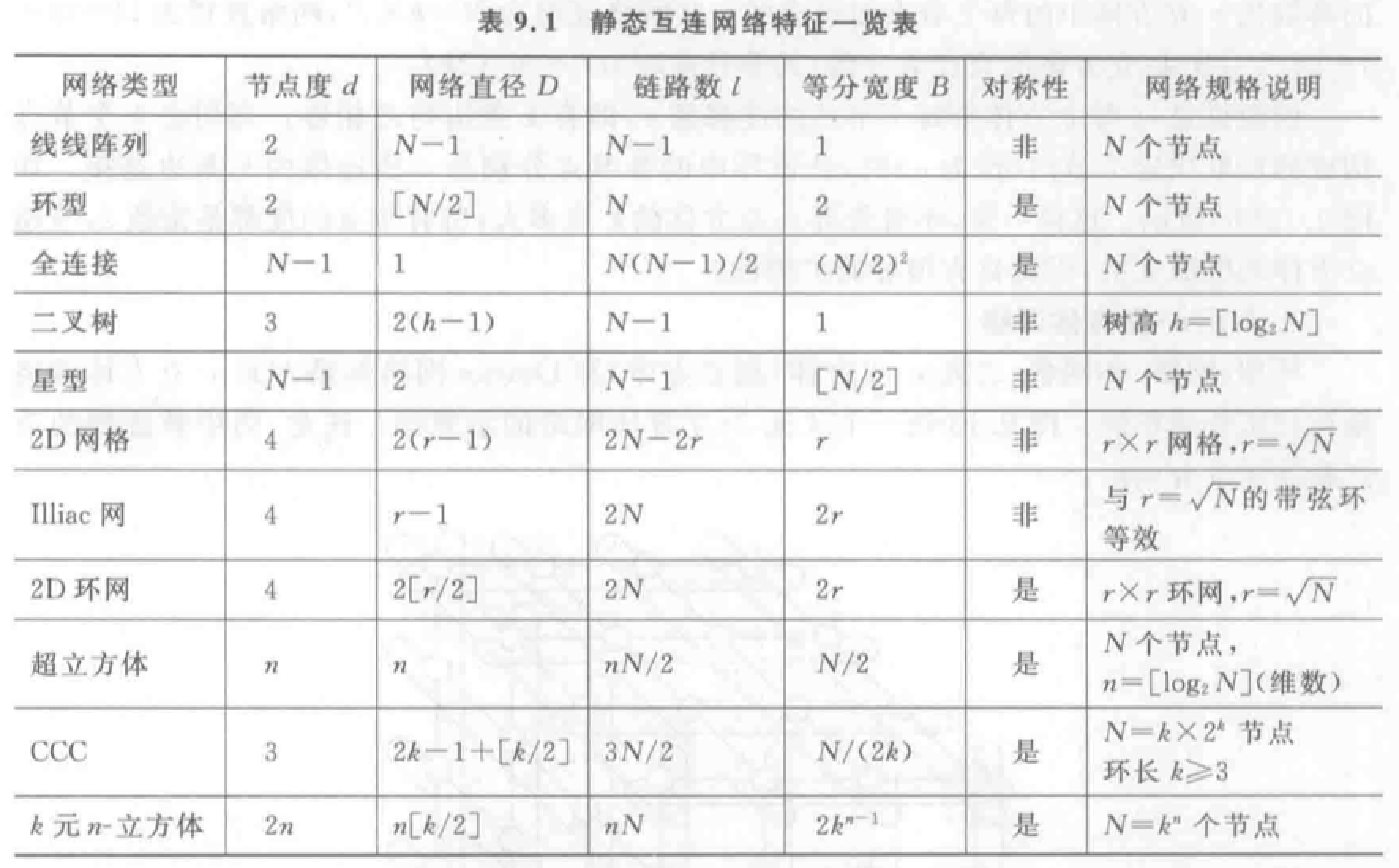
静态互连网络
各结点之间固定连接通路,运行中不能改变。
线性阵列:一维线性网络,\(N\) 个结点用 \(N-1\) 个链路连成一行。
环和带弦环:用一条附加链路将线性阵列端结点连接,构成环。
- 带弦环:增加链路越多,结点度越高,网络直径越小。
- 全连接网络:极端情况。
循环移数网络:在环上每个结点到所有与其距离为 2 的整数幂的结点之间都增加一条附加链路。
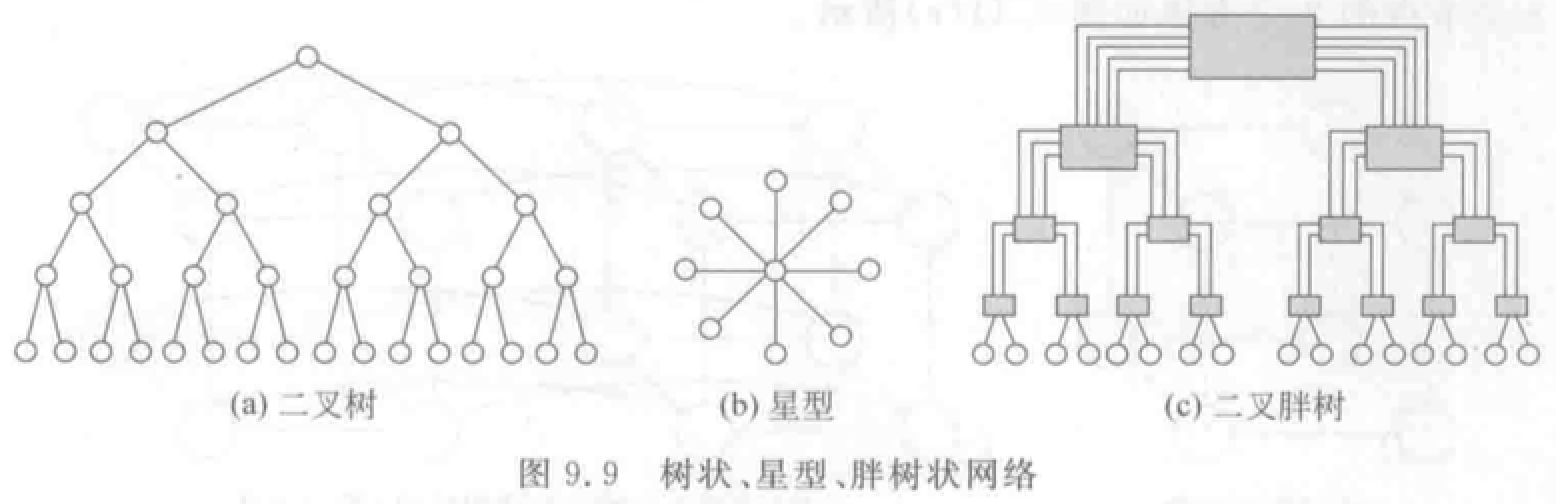
树状:\(k\) 层完全平衡二叉树有 \(N=2^k-1\)个结点。
星形:CS 模式。中心结点故障,整个系统瘫痪。
胖树形:越靠近树根,树干越粗(通道带宽增加)。
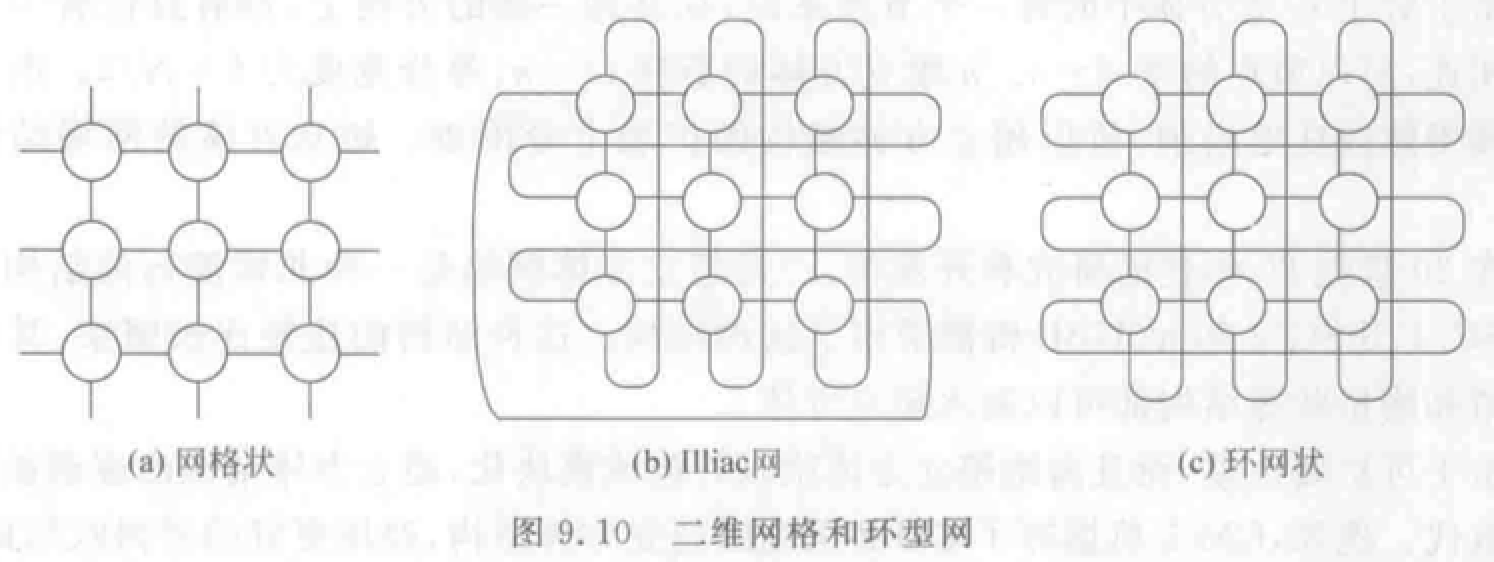
网格形、Illiac、环状网络:
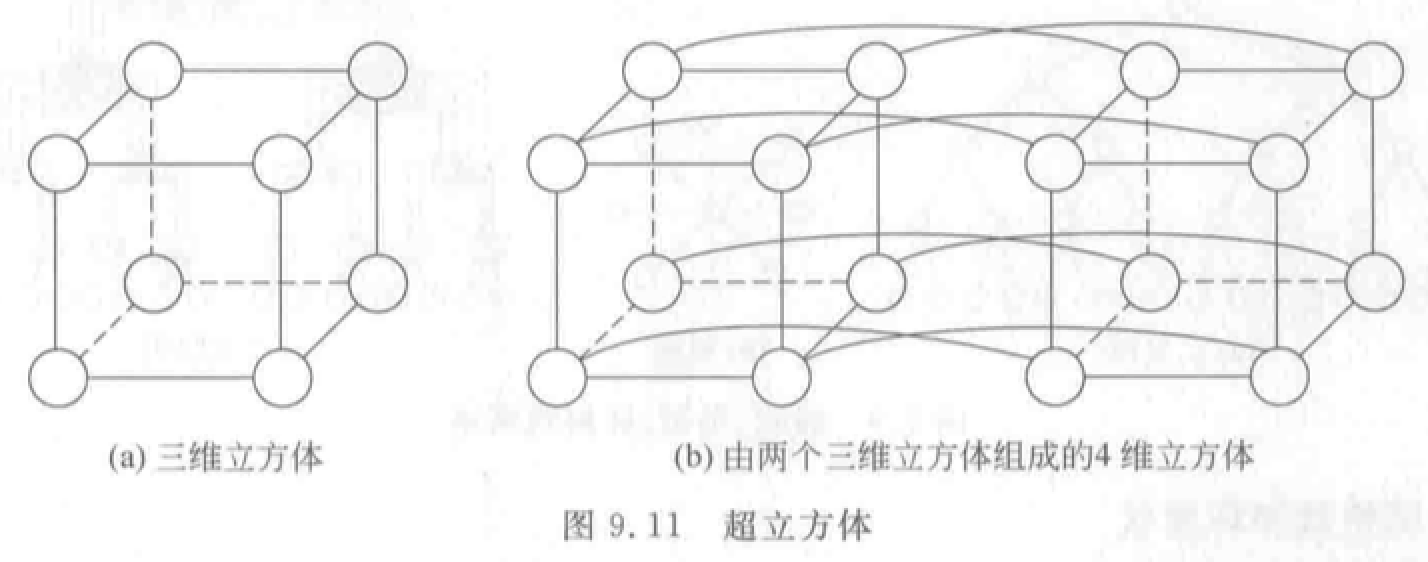
超立方体:\(n\) 维结点数 \(N=2^n\)。对于一个结点,在每一维方向上都只和一个结点相连。
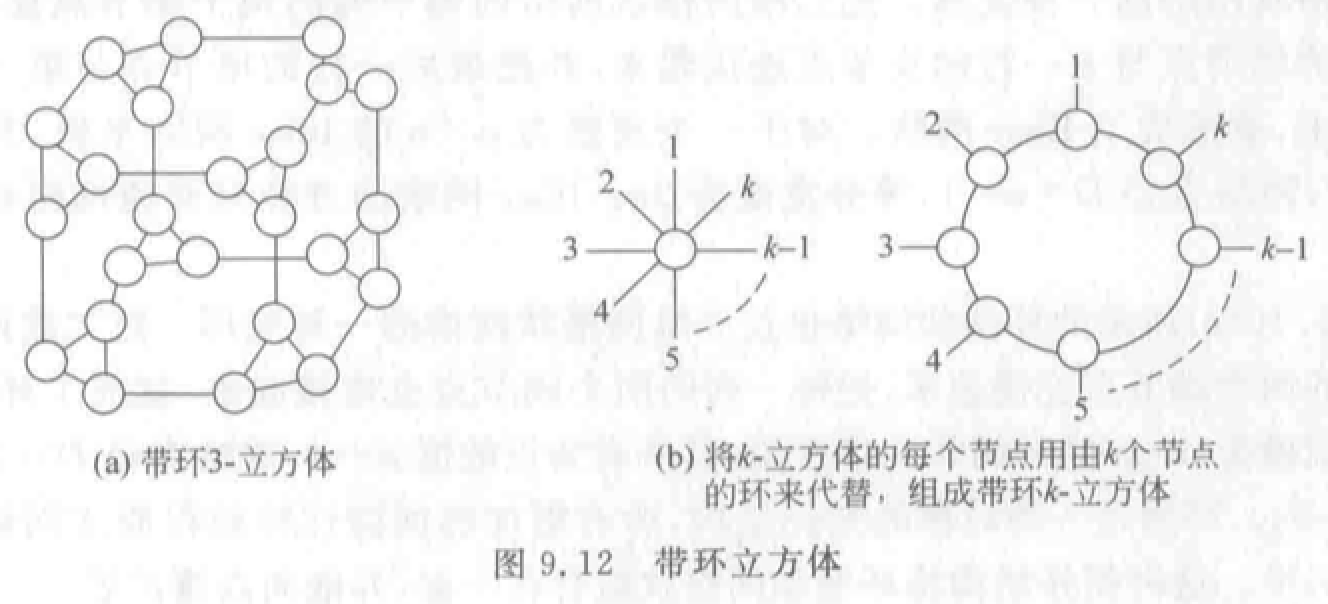
带环 \(n\)-立方体(\(n\)-CCC):用 \(k\) 个结点构成的环代替 \(k\) 维超立方体。结点度恒定,扩展性好。
\(k\) 元 \(n\)-立方体网络:

例题

动态互连网络
由有源交换开关构成,链路可通过设置开关状态重构。网络边界上开关元件可与处理机相连。
总线结构
- 优点:结构简单、实现成本低。
- 缺点:模块分时共享,带宽较窄。(可采用多总线或多层次总线解决)
交叉开关网络
- 可以无阻塞实现 \(n!\) 种置换。
- 其他参考交换原理。
多级互联网络
MIMD 和 SIMD 计算机都采用多级互连网络 MIN。
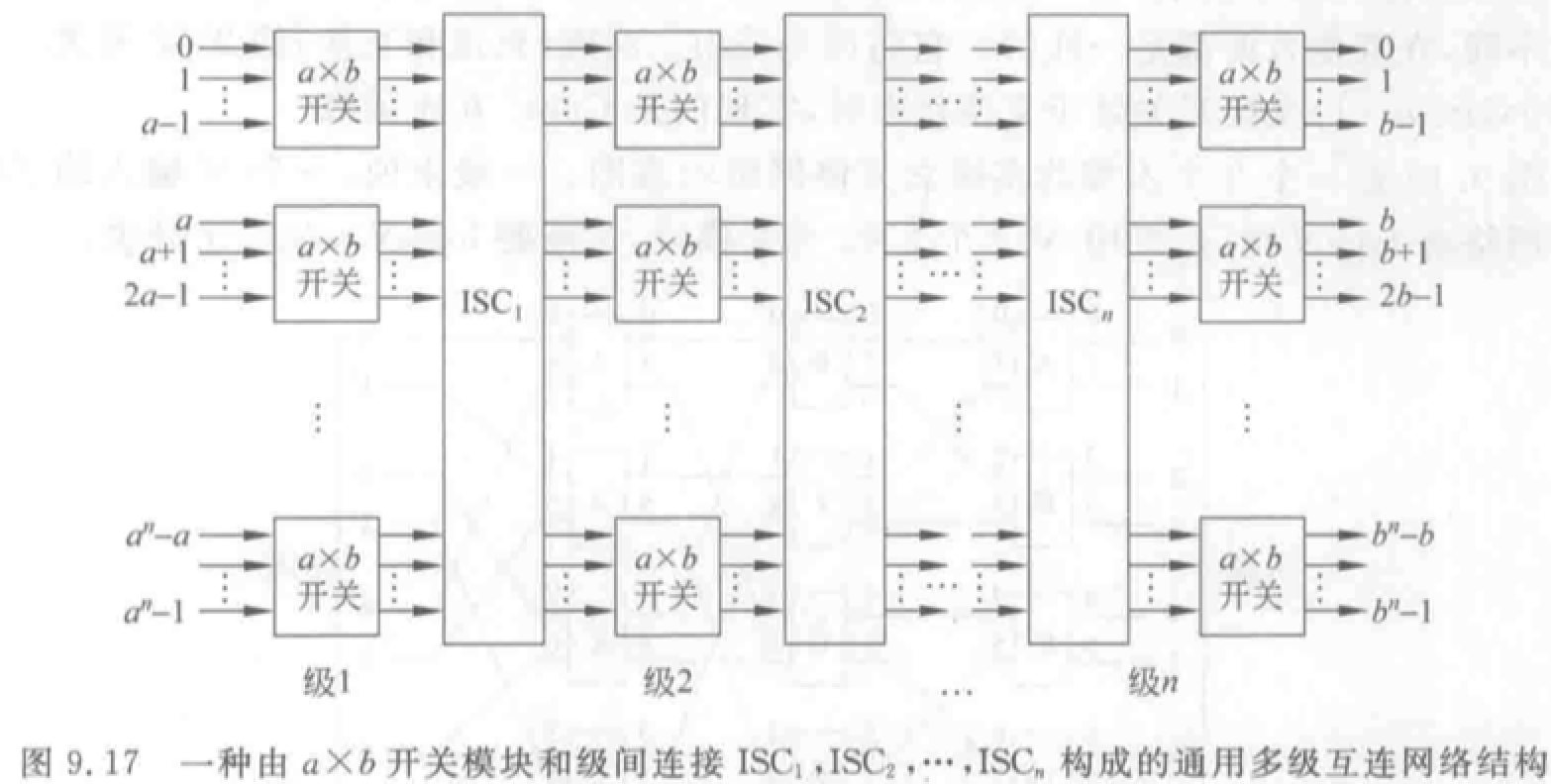
区别:开关模块、控制方式、级间互连模式不同。
- \(2\times2\) 开关模块:直送、交叉、上播、下播。
- 控制方式:级控制、单元控制、部分级控制
- 级间互连:参考交换原理。
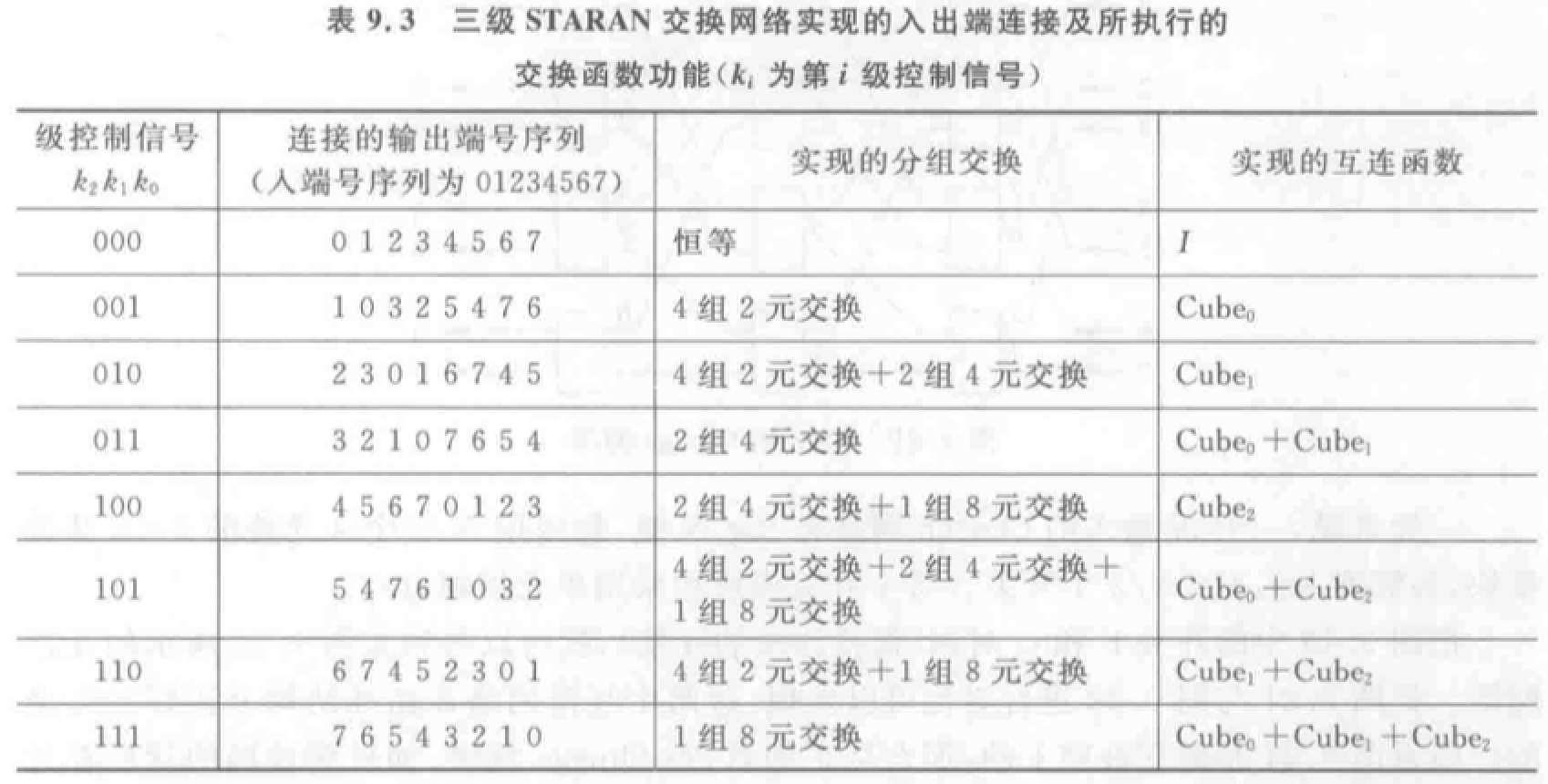
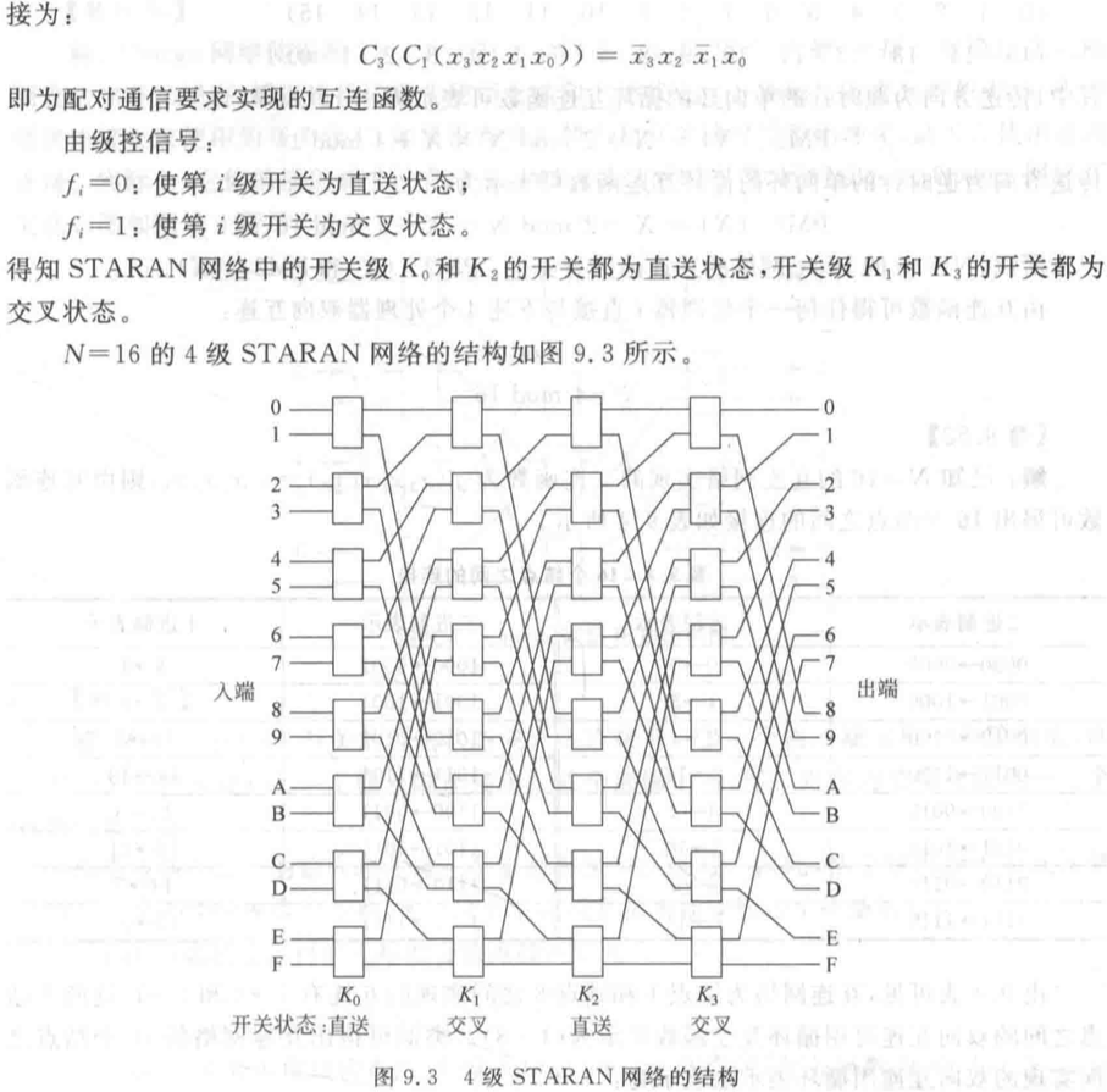
多级立方体网络:STARAN 网络、间接二进制 \(n\) 方体网络。都采用二功能(直送和交换)的 \(2\times2\) 开关。当第 \(i\) 级(\(0\leq i\leq n-1\))交换开关处于交换状态时,实现的是 \(Cube_i\) 互联函数。
STARAN 网络采用级控制(实现交换功能)和部分级控制(实现移数功能),间接二进制 \(n\) 立方体网络采用单元控制。
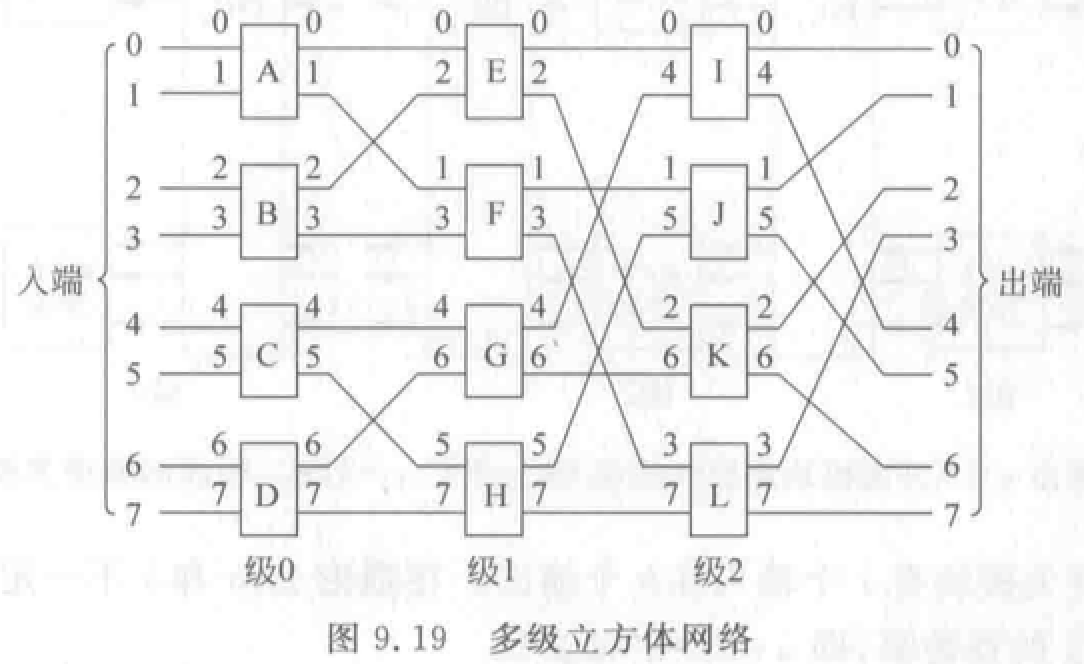

例题


Omega 网络:级间全部采用均匀洗牌。\(N=8\) 的多级立方体互连网络的另一种画法。
\(N\) 个输入有 \(\log_2 N\)级,每级 \(N/2\) 个四功能的 \(2\times2\) 开关模块。
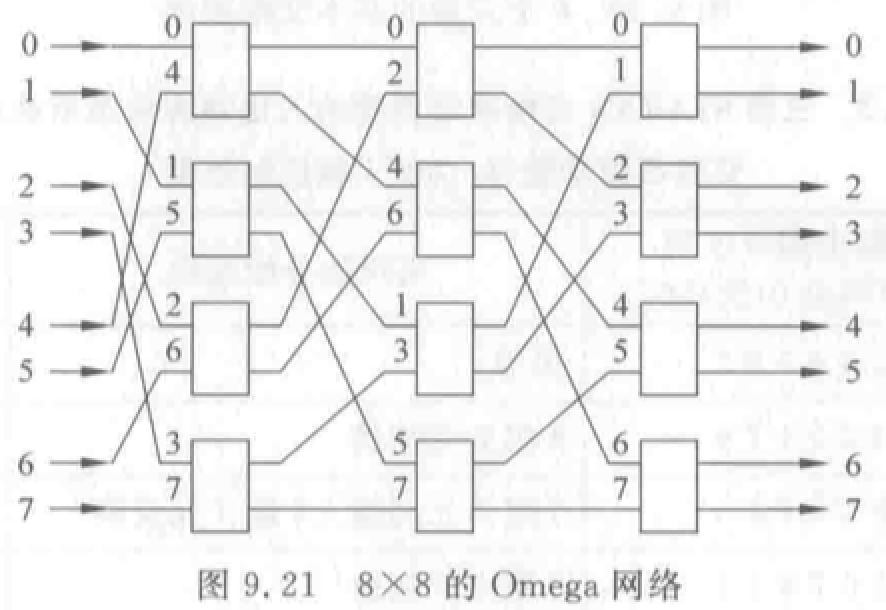
例题

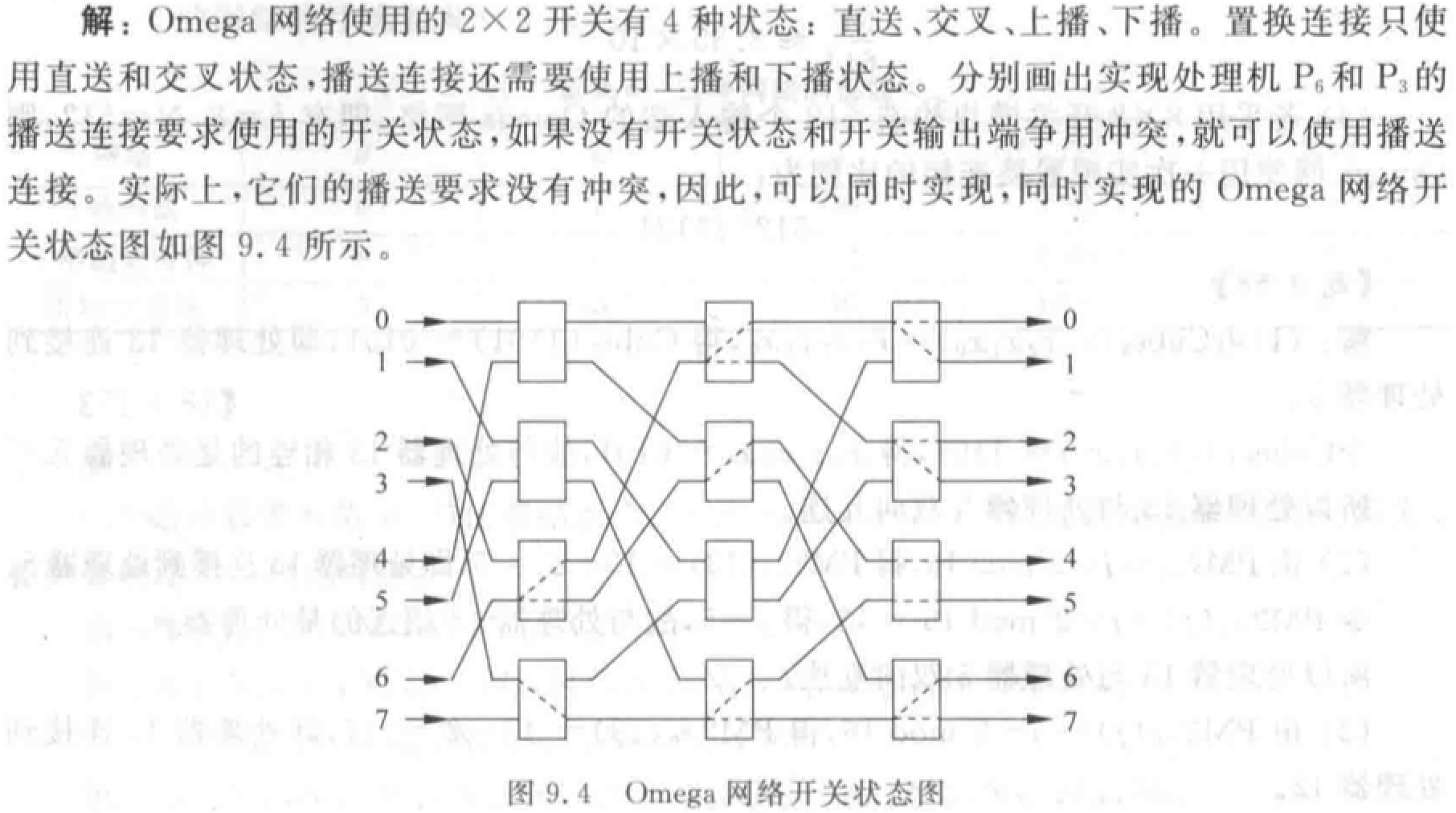

(1)N 个输入的不同排列数为 \(N!\)。
(2)N 个输入端、输出端的 Omega 网络有 \(n=log_2N\) 级开关级,每级开关级有 \(N/2\) 个 \(2\times 2\) 的 4 功能开关,总共有 \((N/2)\log_2N\) 个开关。置换连接是指网络的输入端与输出端的一对一连接,故只考虑 \(2\times 2\) 开关的 2 个功能状态,即直送与交叉。网络采用单元控制,因此,每个开关都根据连接要求处于 2 个功能状态中的一种状态,所以,由 \((N/2)\log_2N\) 个开关组成的 Omega 网络的开关状态的种数为 \(2^{(N/2)\log_2N}=N^{N/2}\)。
(3)若 \(N=8\),则一次通过能实现的置换数占全部排列的百分比为 \(\frac{N^{N/2}}{N!}=10.16\%\)
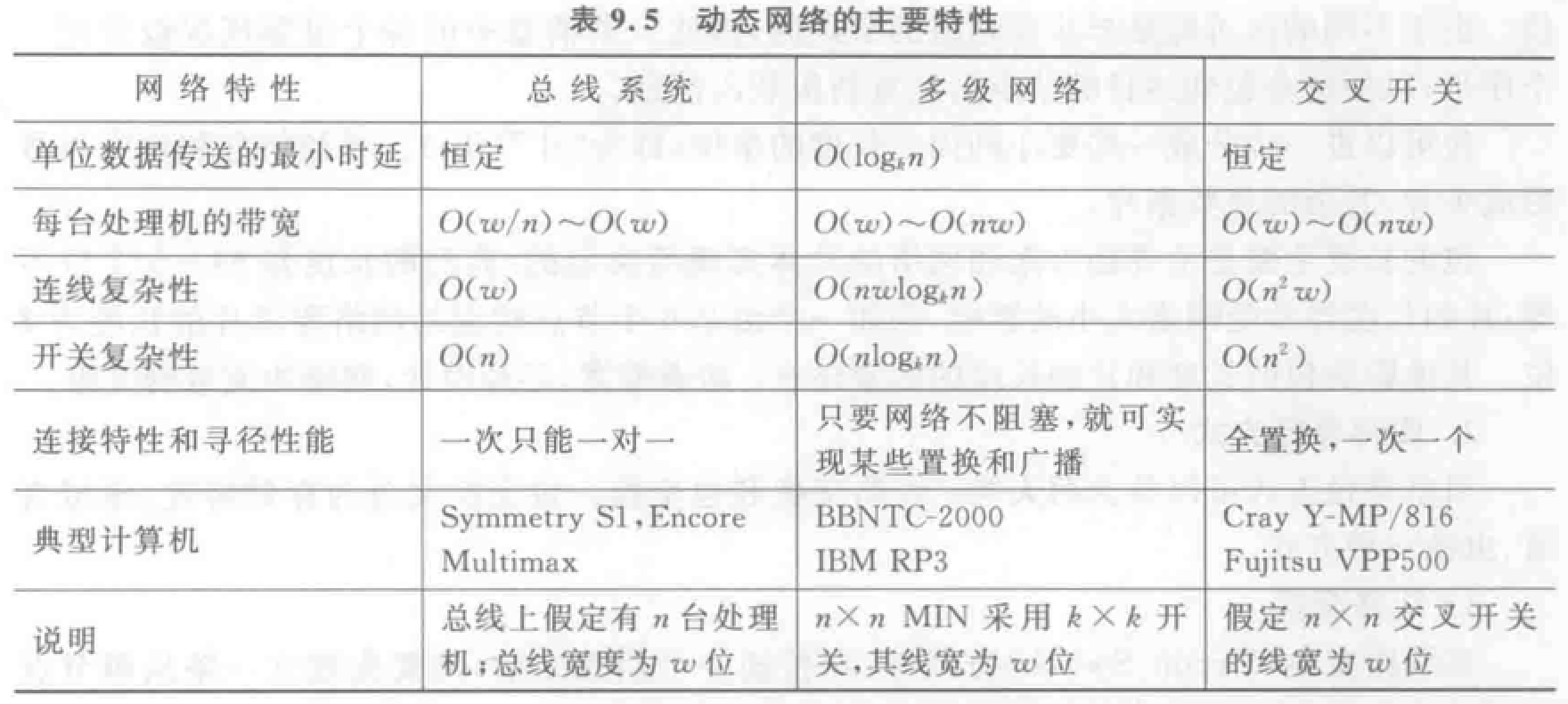
| 网络 | 优点 | 缺点 |
|---|---|---|
| 总线互连 | 简单、成本低 | 带宽较窄 |
| 交叉开关 | 带宽和寻路性能最好 | 成本最高 |
| 多机互连 | 模块化结构、扩展性较好 | 时延随级数增加而增加,复杂度比总线高很多,成本较高 |
消息传递机制
RPC:Remote Process Call,远程进程调用。
消息寻径方案:
- 消息格式:
- 消息:节点间通信的逻辑单位,由若干“包”组成。包的长度固定但是数量可变。包是包含寻径所需目的地址的基本单位。包分为若干“片”,大小固定。寻径信息和包序列号形成头片,其余是数据片。
- 两类四种寻径方式:
- 线路交换:建立物理通路再传递信息。时延 \(T=\frac{L+L_t \times (D+1)}{B}\)。\(L\) 为包总长,\(L_t\) 为建立路径所需最小包长度,\(D\) 为中间结点个数,\(B\) 为带宽。
- 优点:带宽大,平均时延小,占用缓冲区小。
- 适合动态和突发性的大规模并行处理数据传送。
- 缺点:频繁建立物理通路时间开销大。
- 包交换
- 存储转发:\(T_{SF} =
\frac{L}{B}(D+1)\)
- 优点:简单。
- 缺点:包缓冲区大、网络时延大。
- 虚拟直通路:\(T = T_f \times D +
\frac{L}{B} \approx \frac{L}{B}\)
- 优点:通信时延与结点数无关。
- 缺点:中间结点依然需要缓冲器、寻径阻塞时依然需要存储整个包,占用缓冲区大。
- 虫蚀:最小单位为片。一个结点把头片送到下一个结点后,后面的各片才能依次送出。\(T_{WH} \approx \frac{L}{B}\)
- 优点:每个结点缓冲器小,易于 VLSI 实现。有较小的网络传输延迟。
- 缺点:一片被阻塞时,该消息所有片都被阻塞在结点。
- 存储转发:\(T_{SF} =
\frac{L}{B}(D+1)\)
- 线路交换:建立物理通路再传递信息。时延 \(T=\frac{L+L_t \times (D+1)}{B}\)。\(L\) 为包总长,\(L_t\) 为建立路径所需最小包长度,\(D\) 为中间结点个数,\(B\) 为带宽。
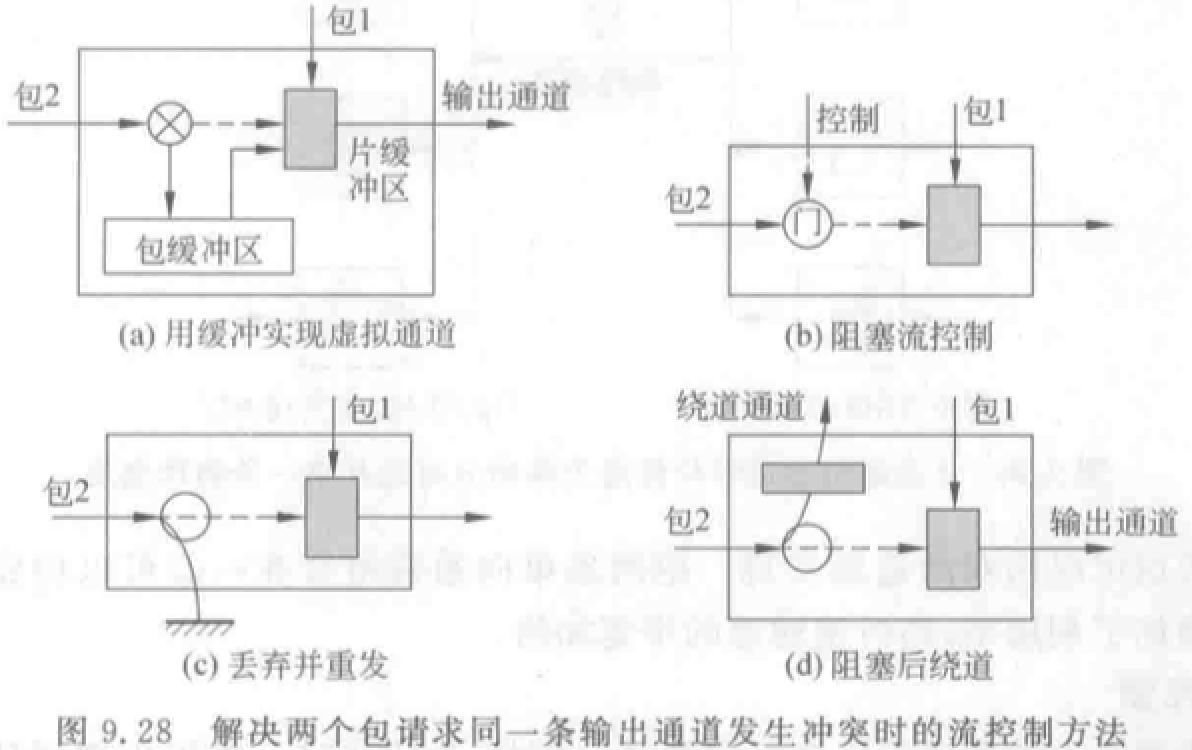
虚拟通道:两个结点间的逻辑链接,它由源结点的片缓冲区、结点间的物理通道以及接收结点的片缓冲区组成。
缓冲区或通道上的循环等待会引起死锁,利用虚拟通道可以避免一些死锁。
包冲突的解决:
确定性寻径:通信路径完全由源结点地址和目的地址来决定,也就是说,寻径路径是预先唯一地确定好了的,而与网络的状况无关。
自适应寻径:通信的通路每一次都要根据资源或者网络的情况来选择。
对于一个多维网来说,维序寻径要求对后继通道的选择是按照各维的顺序来进行的。二维叫 X-Y 寻径,超立方体叫 E-cube 寻径。
- 单播:对应于一对一的通信情况,即一个源结点发送消息到一个目的结点。
- 选播:对应于一到多的通信情况,即一个源结点发送同一消息到多个目的结点。
- 广播:对应于一到全体的通信情况,即一个源结点发送同一消息到全部结点。
- 会议:对应于多到多的通信情况。
- 通道流量可用传输有关消息所使用的通道数来表示。
- 通信时延则用包的最大传输时间来表示。
第十章 多处理机
重点
多处理机概念:
- MIMD 计算机的特点、分类:PVP/SMP/MPP/DSM/COW
对称式共享存储器多处理器(SMP)系统结构及特点
分布式共享存储器多处理器系统结构及特点
- Cache 一致性问题成因和解决方法(写作废、写更新)
- 监听协议法
- 目录表协议(三种结构)
MIMD 计算机特点、分类
MIMD 是通用计算机系统的主要选择。
分类:
- 并行向量多处理机 PVP,第四章:多台巨型向量处理机,共享存储器互连而成。
- 大规模并行处理机 MPP,第十章:计算机模块作为一个结点,通过专用接口连接到互连网络上。
- 集中式共享存储器多处理机 SMP:主流。
- 分布式存储器多处理机。
- 分布式共享存储器系统 DSM。
- 机群多处理机 COW,第十二章:多个完整的计算机,通过商品化互连网络(以太网、ATM 等)相连。
特性:高性能、灵活性。
根据存储器组织结构分类:
集中式共享存储器结构(对称式共享存储器多处理机 SMP):
- 共享集中式物理存储器、通过总线或交换开关互连。
- 也被称为 UMA(Uniform Memory Access)结构。各处理器访问存储器时延相同。
- 最流行结构。
分布式存储器多处理机:存储器分布在各结点。
- 要求高带宽互连网络。
- 优点:① 若大多数需求为本地访存,可以降低存储器、互连网络带宽需求。② 本地存储器访问时延小。
- 缺点:① 处理器之间通信复杂。② 处理器之间访问延迟较大。
分布式存储器多处理机两种存储器系统结构:
- 共享地址空间(每个结点存储器统一编址):分布式共享存储器系统
DSM, 或非均匀访存模型 NUMA
- 共享逻辑地址空间。
- 任意存储器可访问共享空间中任一单元。
- 不同处理器上同一物理地址指向同一存储单元。
- 具有共享存储器通信机制。采用访存类指令对地址进行读写。优点:
- 与常用的对称式多处理机使用的通信机制兼容。
- 易于编程,同时在简化编译器设计方面也占有优势。
- 采用大家所熟悉的共享存储器模型开发应用程序,而把重点放到解决对性能影响较大的数据访问上。
- 当通信数据量较小时,通信开销较低,带宽利用较好。
- 可以通过采用 Cache 技术来减少远程通信的频度,减少了通信延迟以及对共享数据的访问冲突。
- 在共享存储器上支持消息传递相对简单。
- 独立地址空间(编址相互独立):多存在于机群 COW
- 系统地址空间由多个独立地址空间组成。
- 每个结点存储器只能本地存储器访问。
- 每个存储器-处理器模块是一台单独计算机
- 具有消息传递通信机制。采用显式传递消息请求操作或数据完成通信。优点:
- 硬件较简单。
- 通信是显式的,因此更容易搞清楚何时发生通信以及通信开销是多少。
- 显式通信可以让编程者重点注意并行计算的主要通信开销,使之有可能开发出结构更好、性能更高的并行程序。
- 同步很自然地与发送消息相关联,能减少不当的同步带来错误的可能性。
- 在消息传递硬件上支持共享存储器相对困难。
并行处理的挑战:
- 程序中的并行性有限(Amdahl 定律导致加速比不高)
- 解决:采用并行性更好的算法
- 通信开销较大
- 解决:依靠系统结构支持使远程访问延迟降低、改进编程技术。
反应并行程序性能的重要度量:计算/通信比率。正相关于数据规模,负相关于处理器数目。
Cache 一致性问题
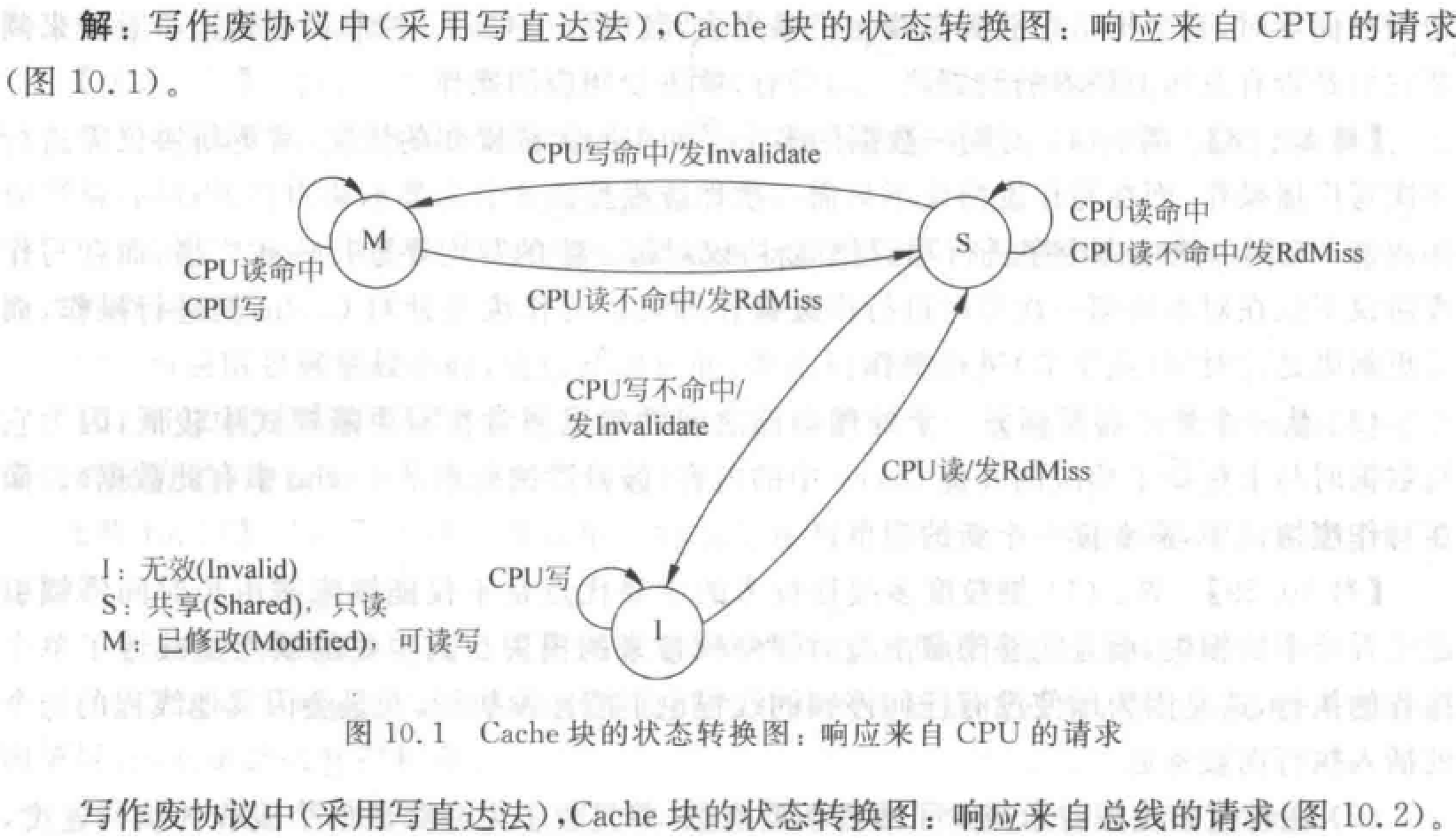
(写直达法:写入 Cache 的时候立即写入存储器。写回法:写入 Cache,换出时写入存储器。)
允许共享数据进入 Cache,会出现多个处理器 Cache 中都有同一存储块的副本。当某个处理器对 Cache 修改后,导致其 Cache 中的数据与其他处理器 Cache 中的数据不一致。
存储器一致性定义:对存储器中某个数据项的任何读操作,均能得到其最新写入的值。满足以下三点:
- 处理器 P 对单元 X 进行一次写之后又对单元 X 进行读,读和写之间没有其它处理器对单元 X 进行写,则 P 读到的值总是前面写进去的值。
- 处理器 P 对单元 X 进行写之后,另一处理器 Q 对单元 X 进行读,读和写之间无其它写,则 Q 读到的值应为 P 写进去的值。
- 写串行化:对同一单元的写是串行化的,即任意两个处理器对同一单元的两次写,从各个处理器的角度看来顺序都是相同的。
假设:
- 写操作完成的定义:所有处理器均看到写的结果。
- 处理器任何访存操作不改变写的顺序。
Cache 一致性协议:关键在于跟踪记录共享数据块的状态。
- 目录式协议(互连网络)
- 监听式协议(总线)
- Cache 包含物理存储器中数据块的拷贝,保存各个块的共享状态信息。
- Cache 通常连在共享存储器的总线上。
- 当某个 Cache 需要访问时,它把请求放到总线上广播出去。
- 其他 Cache 控制器监听总线,判断它们自身是否有请求的数据块。如果有就进行相应操作。
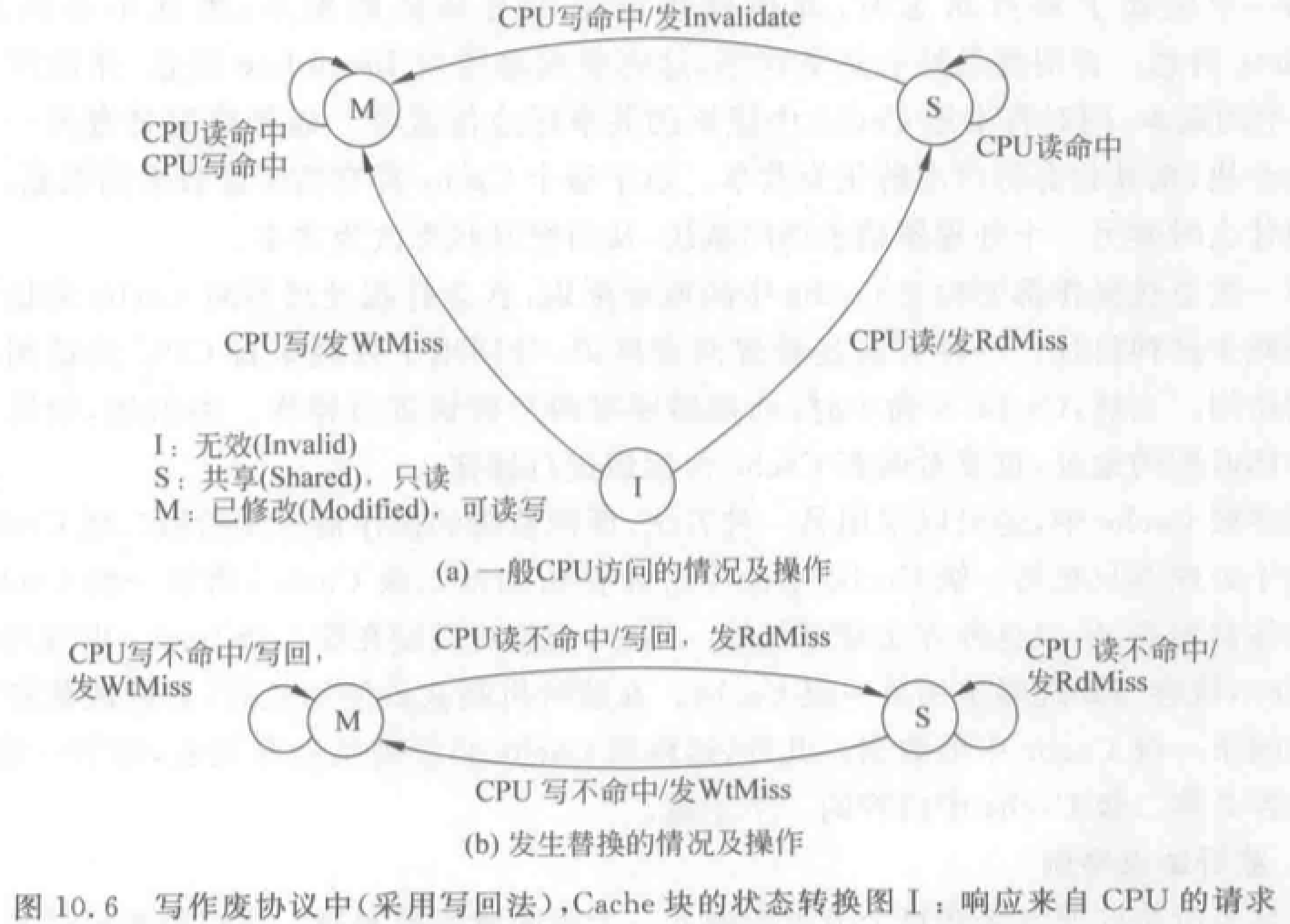
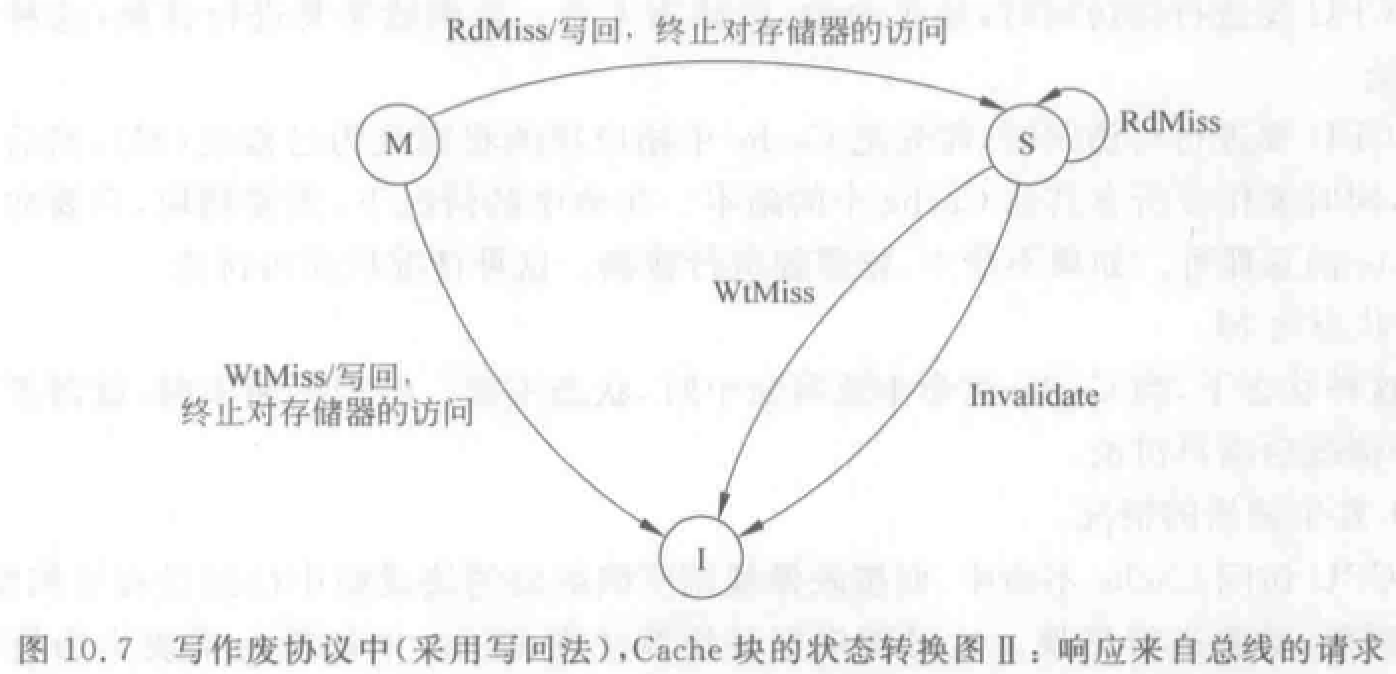
写作废:在处理器对某个数据项写入之前,作废其他副本,保证它拥有对该数据项的唯一访问权。
写更新:当处理器对某数据想进行写入时,通过广播更新其他 Cache 中所有该数据的副本。
性能区别:
- 写作废消耗的总线和存储器带宽更少,多在基于总线的多处理机中采用。
- 写更新的延迟时间较小,适合在处理器个数不多时采用。
监听协议的基本实现技术
- 处理器之间通过可以广播的互连机制(通常是总线)相连。
- 总线实现了写操作的串行化(获得总线控制权具有顺序性)。
- 一个处理器的 Cache 相应本地 CPU 访问时,如果涉及全局操作,Cache 控制器就要在总线上广播相应消息。
- 所有处理器一直监听总线,检测总线上的地址在他们的 Cache 中是否有副本。
- 监听的通常是 Cache 的标识(tag)。
- 给每个 Cache 块增设一个共享位:为“1”:该块是被多个处理器所共享;为“0”:仅被某个处理器所独占。
- 块的拥有者:拥有该数据块的唯一副本的处理器。
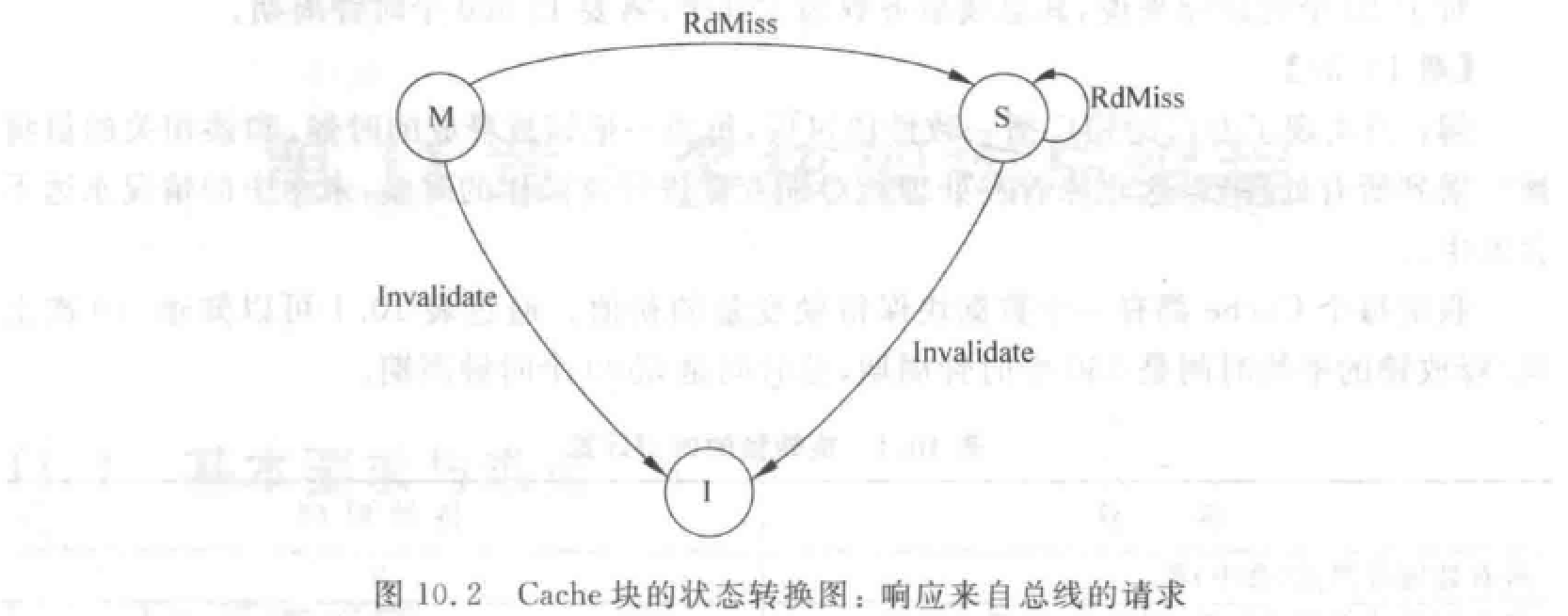
Cache 发送的消息:
- RdMiss——读不命中:需要通过总线找到相应数据块的最新副本,调入本地 Cache。
- WtMiss——写不命中:需要通过总线找到相应数据块的最新副本,调入本地 Cache。写直达法:从主存中总可以取到最新值。写回法:最新值可能在某 Cache 中,也可能在主存中。(后续只讨论写回法)
- Invalidate——作废:通知其他各处理器作废其 Cache 中副本。

目录协议的基本思想与实现技术
广播和监听的机制使得监听协议的可扩放性很差。
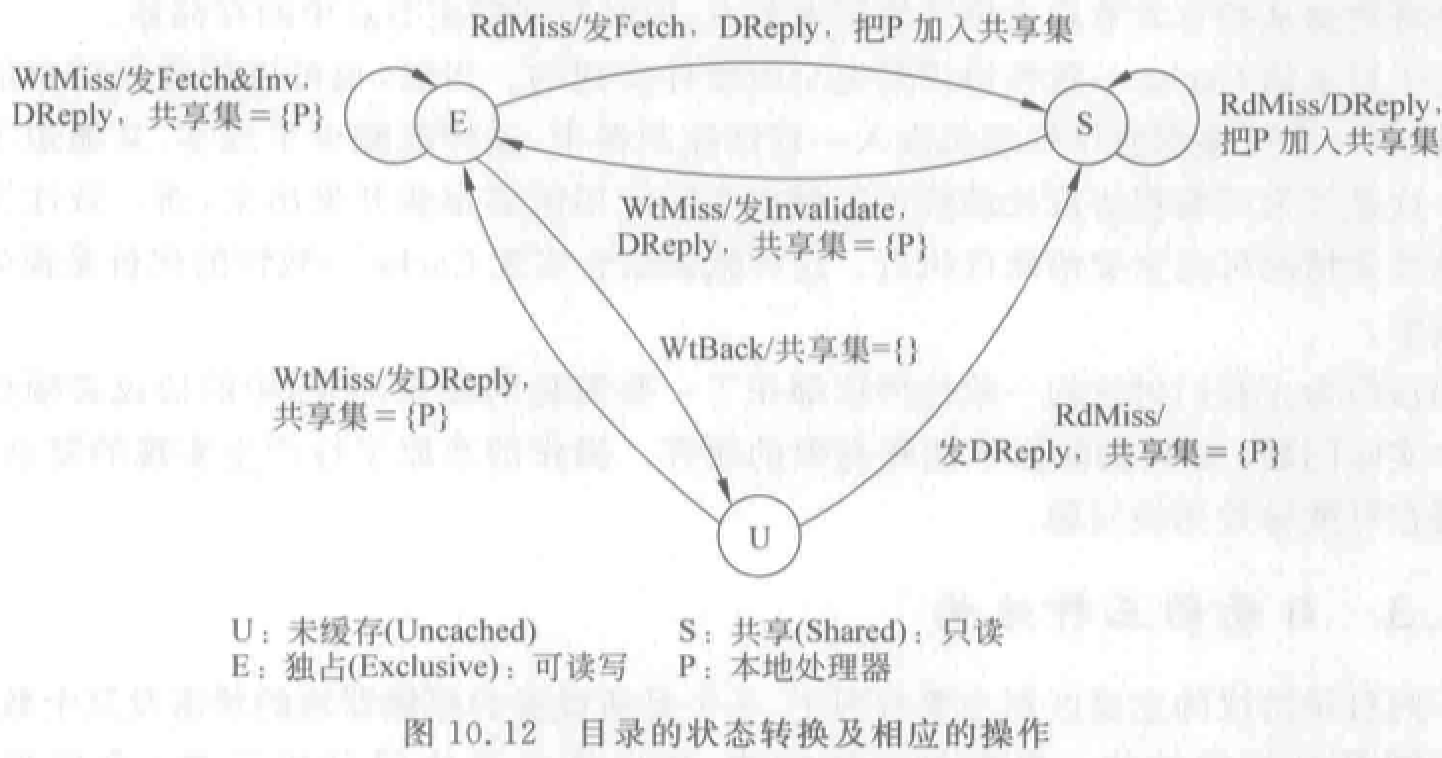
目录协议:
- 主存中设置一个目录表,存放每个数据块(行)状态位和若干指针位(构成一个位向量),指针位对应处理机 Cache 。
- 状态位指示数据块状态,指针位指出哪些处理机 Cache 中有数据块副本。
- 当一个处理机访问本身 Cache 时,根据目录表,有选择地通知存有数据块的处理机 Cache。避免 Cache 的不一致性。
- 位向量:记录哪些 Cache 中有副本,称为共享集 S。
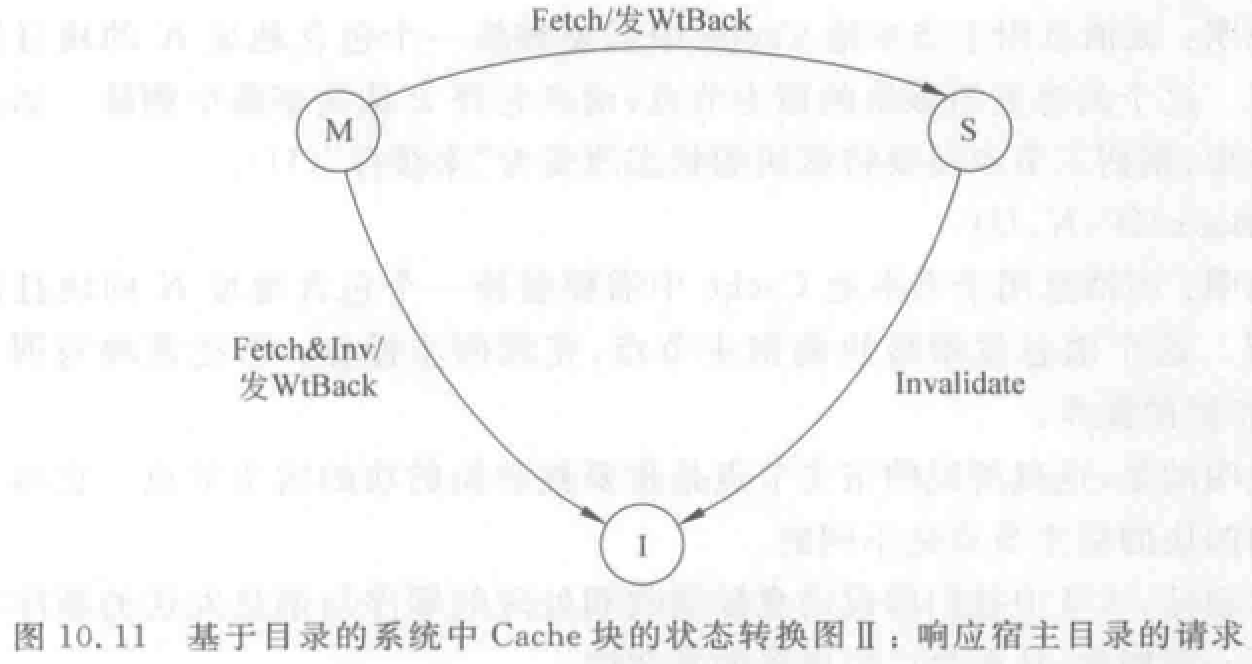
存储块的状态有三种:
- 未缓冲:尚未调入 Cache。所有存储器 Cache 中都没有。
- 共享:一个或多个处理机拥有该块副本,且副本与存储器中的该块相同。
- 独占:仅一个处理机有该块副本,且该处理机已经进行了写操作。存储器中该块数据已过时。这个处理机称为该块拥有者。
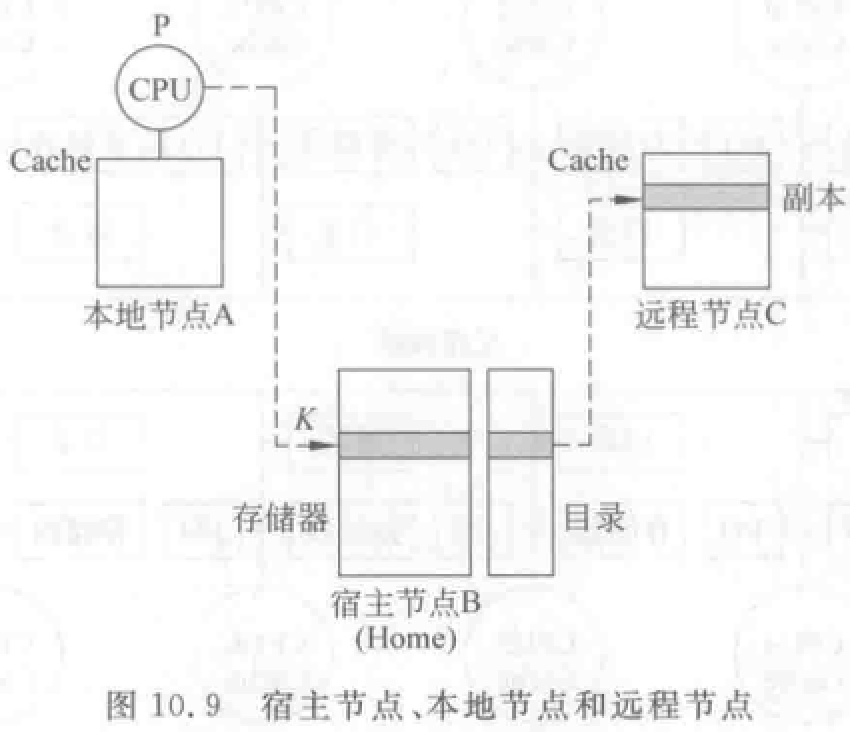
三种结点:
- 本地结点 A:发出访问请求的结点,假设访问的地址为 K。
- 宿主结点 B:包含所访问的存储单元及其目录项的结点 。
- 远程结点 C:拥有存储块副本的结点。可以和宿主结点是同一个结点,也可以不是。
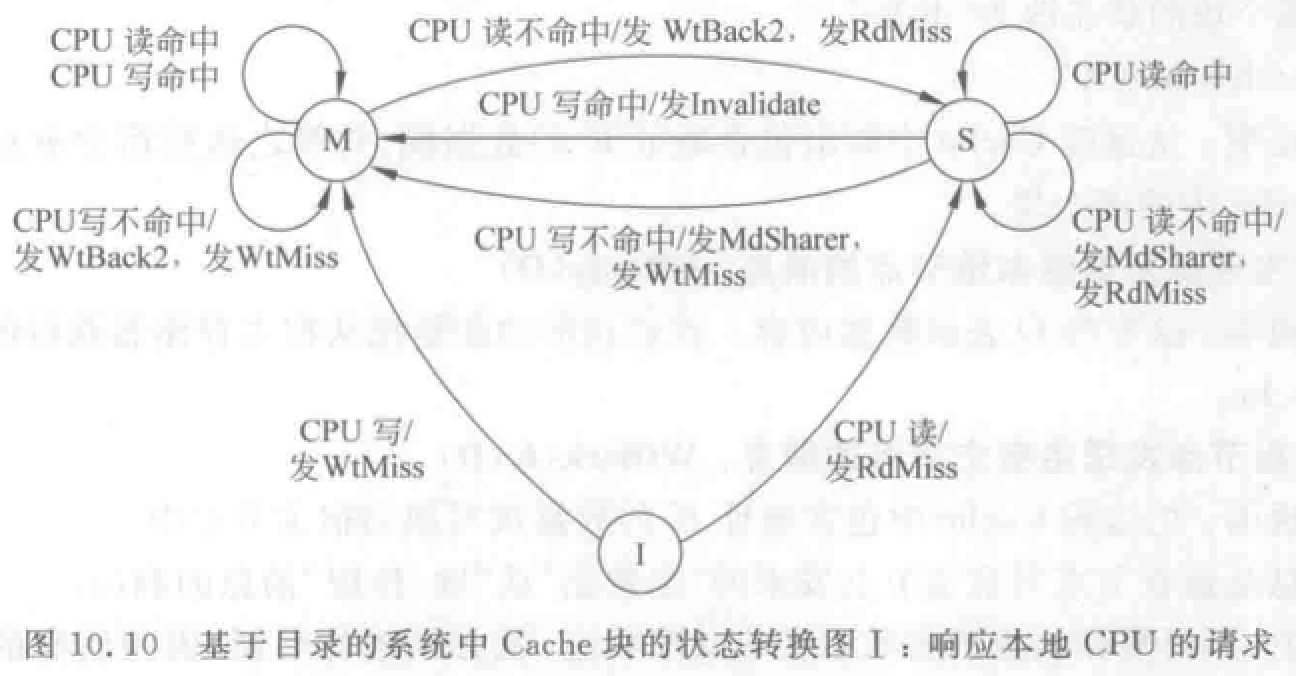
结点间发送的消息:
- 本地结点发送给宿主结点(目录)的消息:
- RdMiss(P,K):处理机 P 读地址 k 数据未命中,请求宿主提供该块,并把 P 加入共享集。
- WtMiss(P,k):处理机 P 写地址 k 数据未命中,请求宿主提供该块,并把 P 设为该块独占者。
- Invalidate(k):向所有拥有相应数据块副本的远程 Cache 发送消息,作废副本。
- 宿主结点发送给本地结点消息:
- DReply(D):把数据 D 返回给本地 Cache。
- Invalidate(k):作废远程 Cache 中地址 k 的数据块。
- Fetch(k):从远程 Cache 取地址 k 数据到宿主结点,并把地址 k 块状态改为共享。
- Fetch&Invalidate(k):从远程 Cache 取地址 k 数据到宿主结点,并作废远程 Cache 中该块。
- 远程结点发给宿主结点的消息:
- WtBack(k,D):把远程 Cache 中地址 k 数据块 D 写回到宿主结点。这是对 Fetch 或 Fetch&Invalidate 的响应。
目录三类结构:
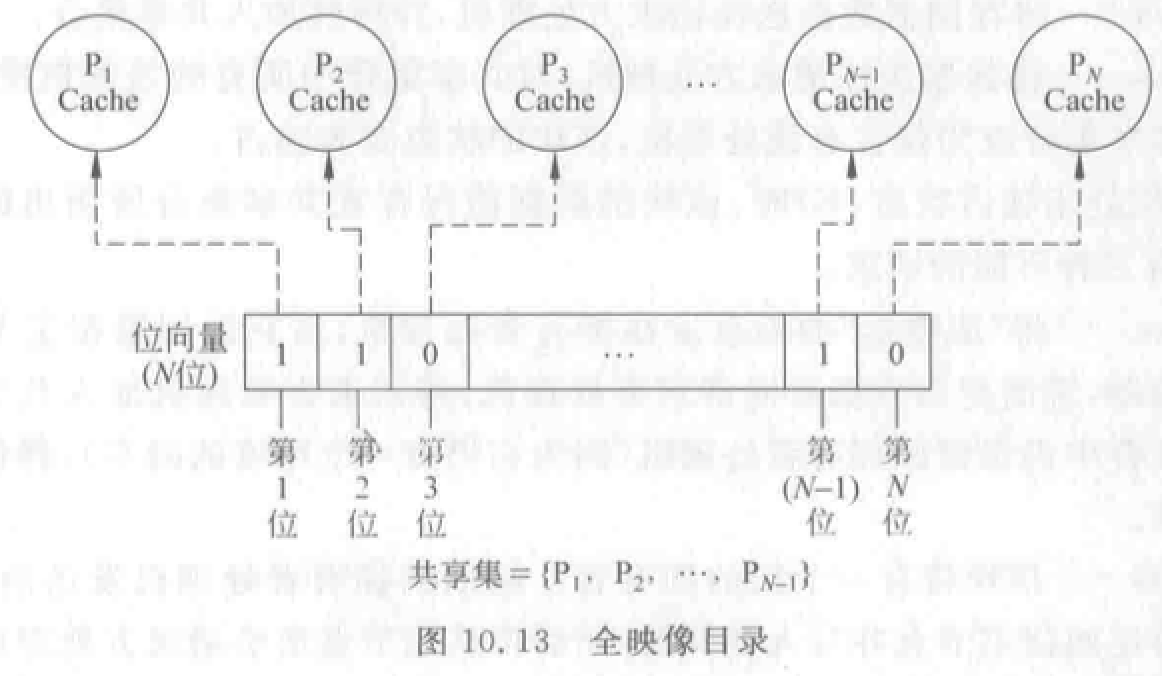
全映像目录:最大。
- 每个目录项包含 \(N\) 位位向量,对应处理机个数。
- 优点:① 处理比较简单、速度快。② 每个 Cache 允许存放同一数据块的副本。
- 缺点:① 存储空间开销大。② 目录空间复杂度\(O(N^2)\)。③ 可扩放性很差。
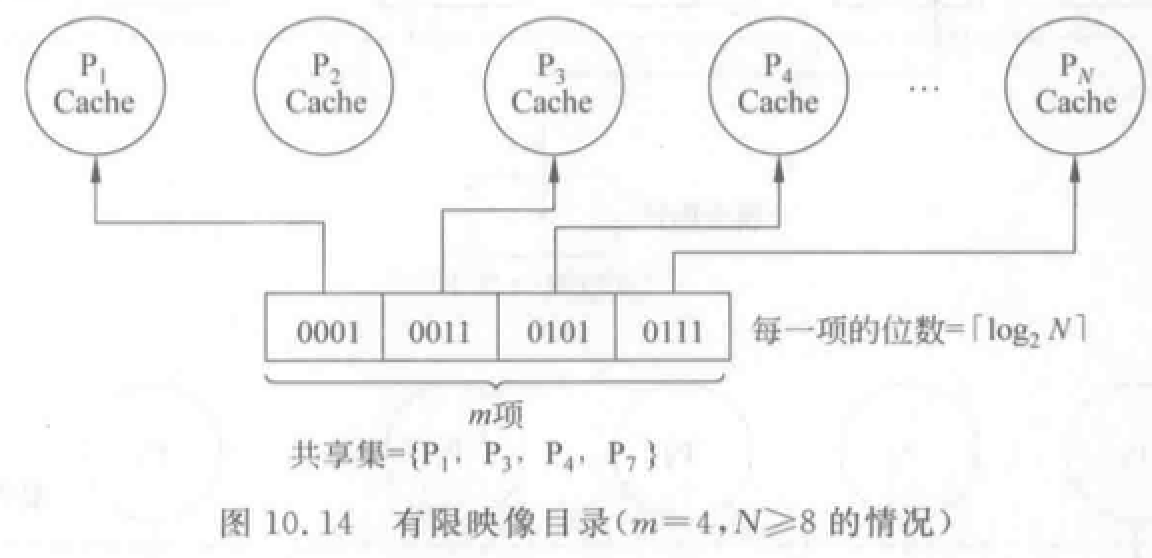
有限映像目录:较大。
优点:提高可扩放性,减少目录占用空间。
核心思想:采用位数固定的目录项目。限制同一数据块在所有 Cache 中的副本总数。
缺点:当目录项中 m 个指针占满,而又需要新调入该块时,就需要在 m 个指针中选择一个废弃。
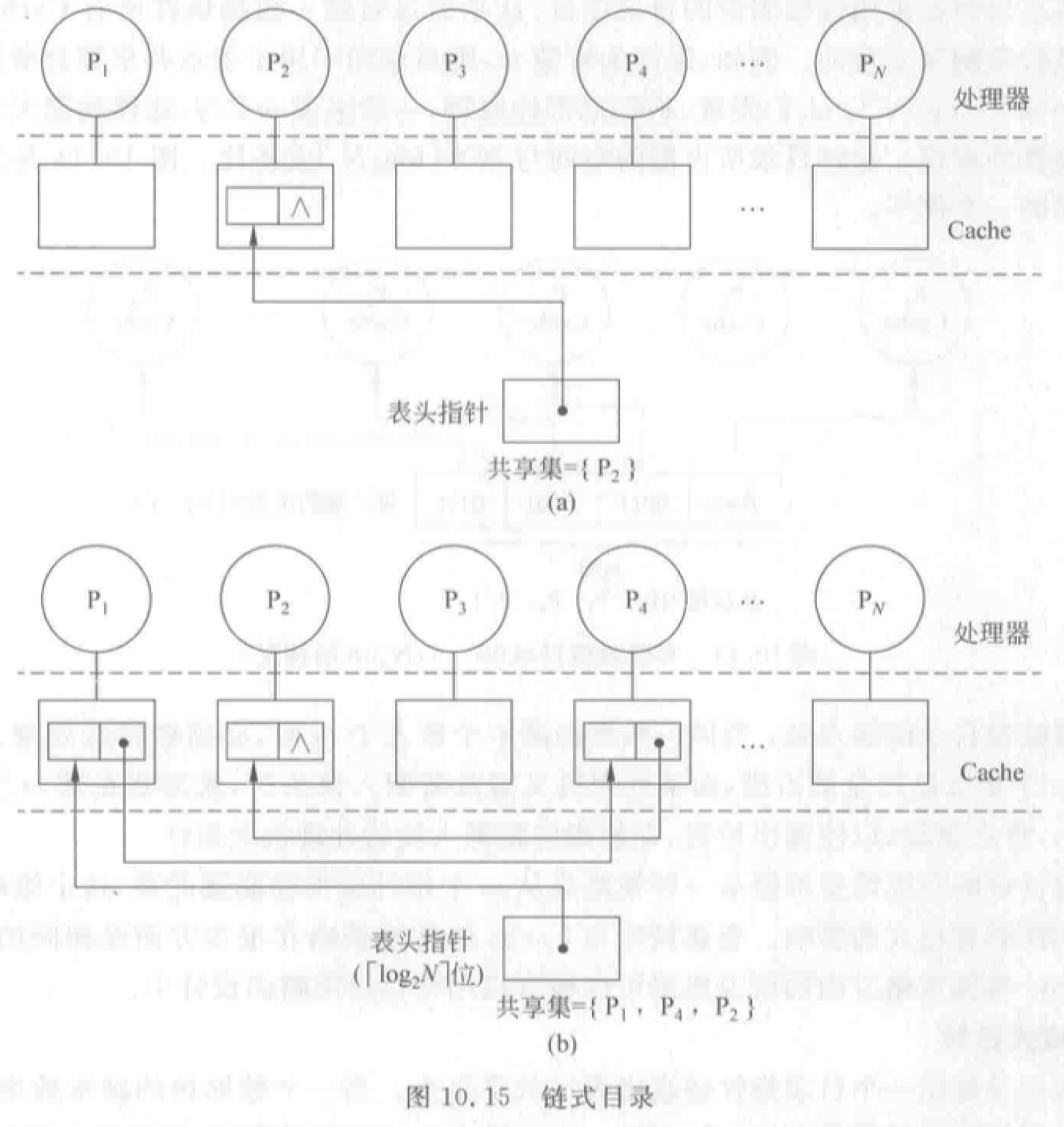
链式目录:最小。
用一个目录指针链表表示共享集合。主存只有一个指针位指向一个处理机 Cache。
优点:不限制副本个数,扩展性好。
第十三章 阵列处理机
重点
阵列处理机概念
阵列处理机的结构:
- 分布式存储器的阵列机
- 共享存储器的阵列机
阵列处理机的特点(与流水线向量对比)
了解 ILLIAC IV 和 BSP 阵列处理器基本结构
典型算法:
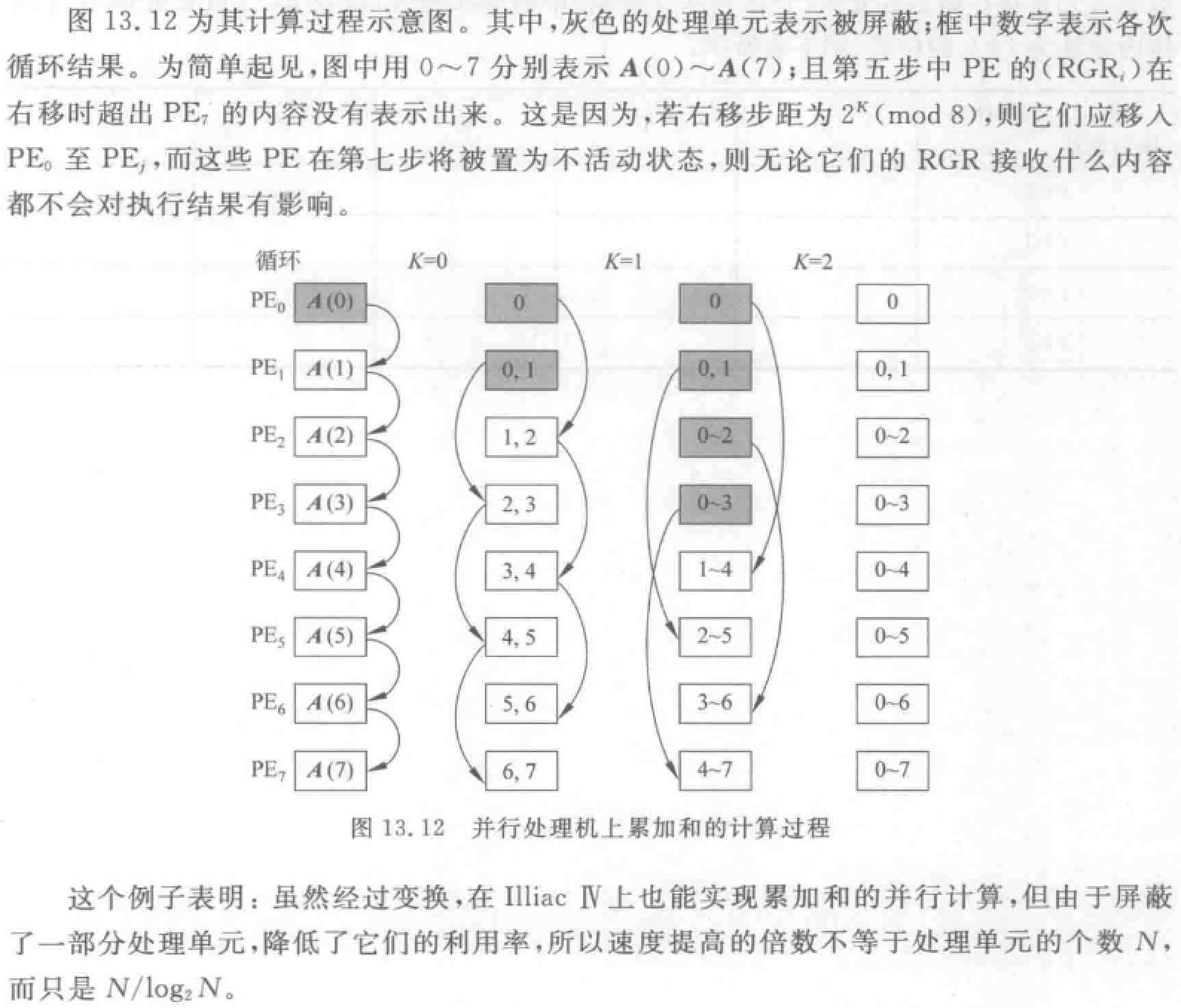
- 递归折叠求和算法
概念
操作模型用五元组表示:阵列处理机=\((N,C,I,M,R)\),N 为处理单元 PE 数、C 为控制部件 CU 直接执行的指令集、I 为 CU 广播至所有 PE 并行执行的指令集、M 为屏蔽方案集、R 为数据寻径功能集。
阵列处理机的特点:
- SIMD
- 利用并行性中的同时性,而非并发性。所有处理单元同时进行相同的操作。
- 受互连网络结构限制,限制了适用的求解算法类别。
结构
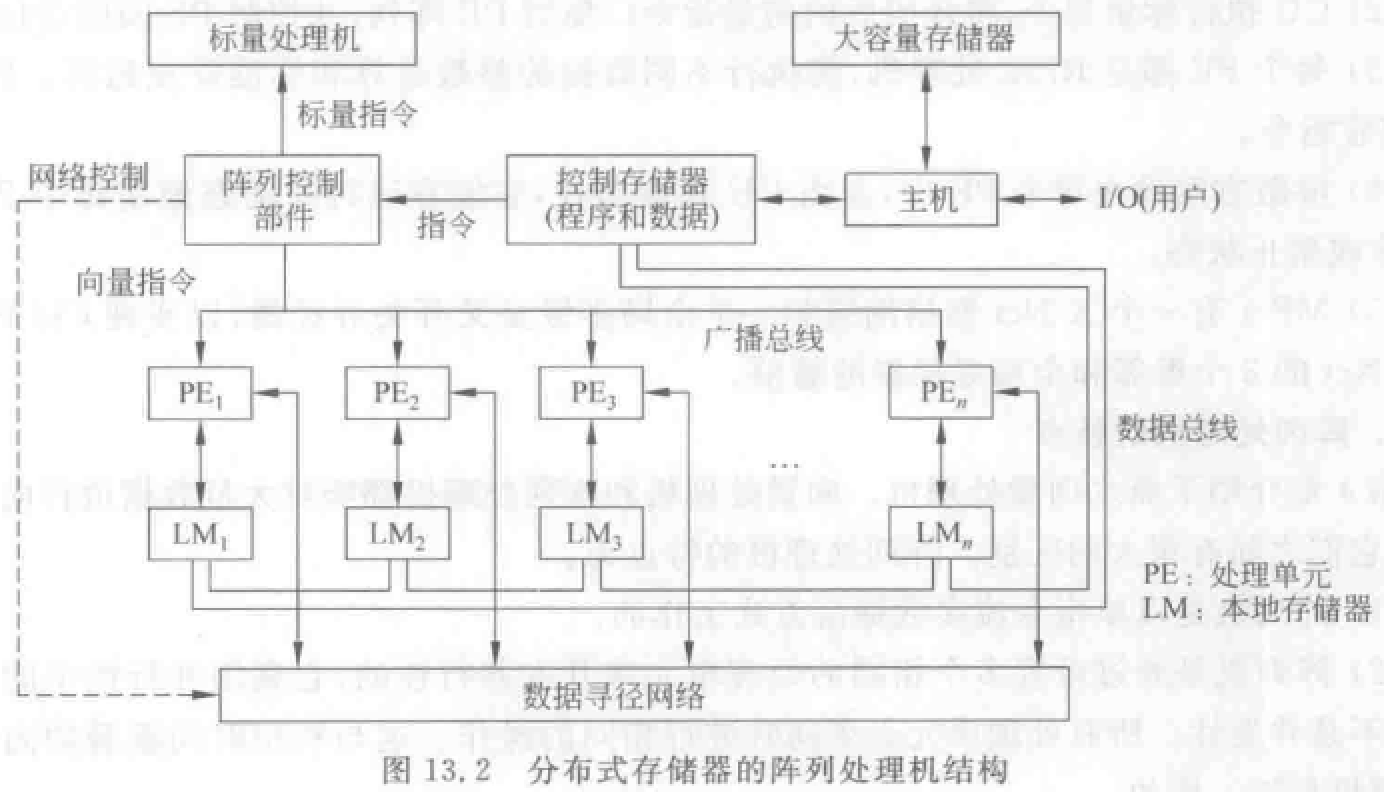
分布式存储器阵列机:
- 主机:程序编辑、编译、调试,程序和数据装入(控制存储器)。
- 指令送到阵列控制部件译码。标量指令由标量处理机执行,向量指令通过广播总线播送到所有 PE 执行。
- 数据集划分后通过数据总线分布存放到 PE 的本地存储器 LM。
- 有多个处理单元 PE,PE 有自己的本地存储器 LM。PE 之间通过数据寻径网络连接实现通信。
- PE 的同步在控制部件的控制下由硬件实现,PE 在一个周期执行同一条指令。
- 屏蔽逻辑控制某些 PE 在指定指令周期是否参与执行。
- 主要区别在于数据寻径网络不同。IlliacIV:4 邻接网络、CM-2:嵌入网格的超立方体,等。
- 大部分阵列处理机都是分布式存储器。易于构成 MPP。
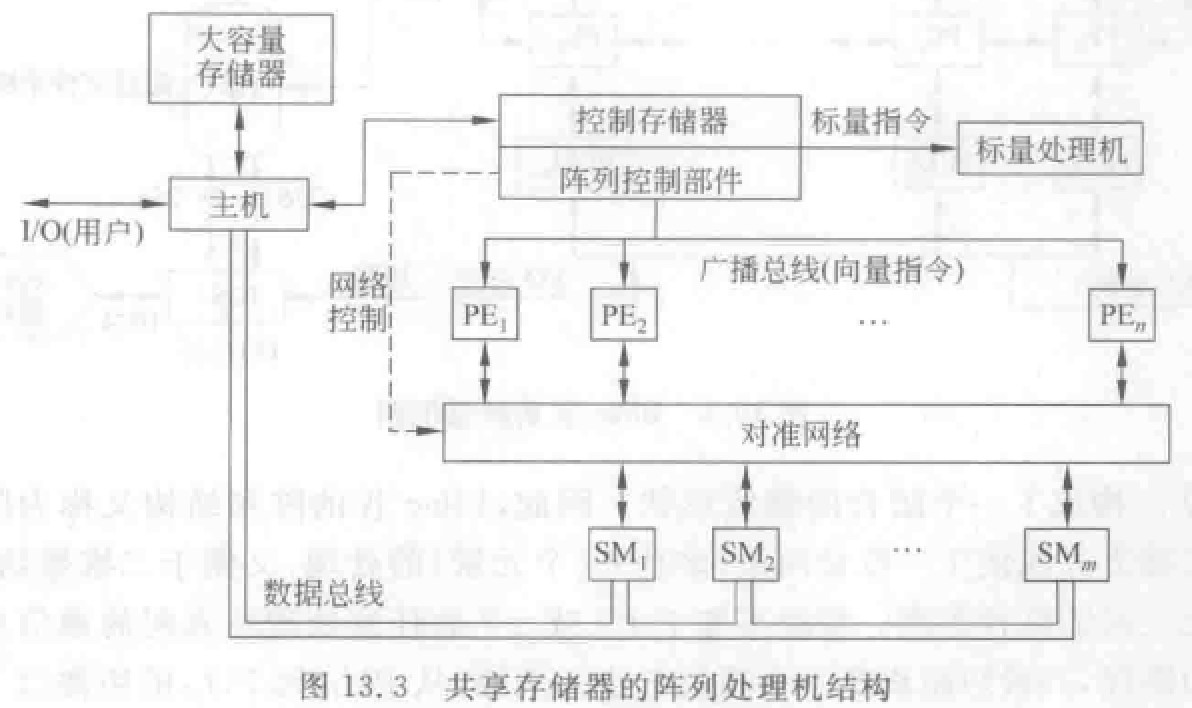
共享存储器
- 集中设置存储器:共享多体并行存储器 SM——通过对准网络——连接 PE。
- 存储模块数目等于或略大于 PE 数目。
- 必须减少访存冲突,适合较少 PE 情况。
- 所有阵列指令使用长度等于 PE 个数的向量操作数。
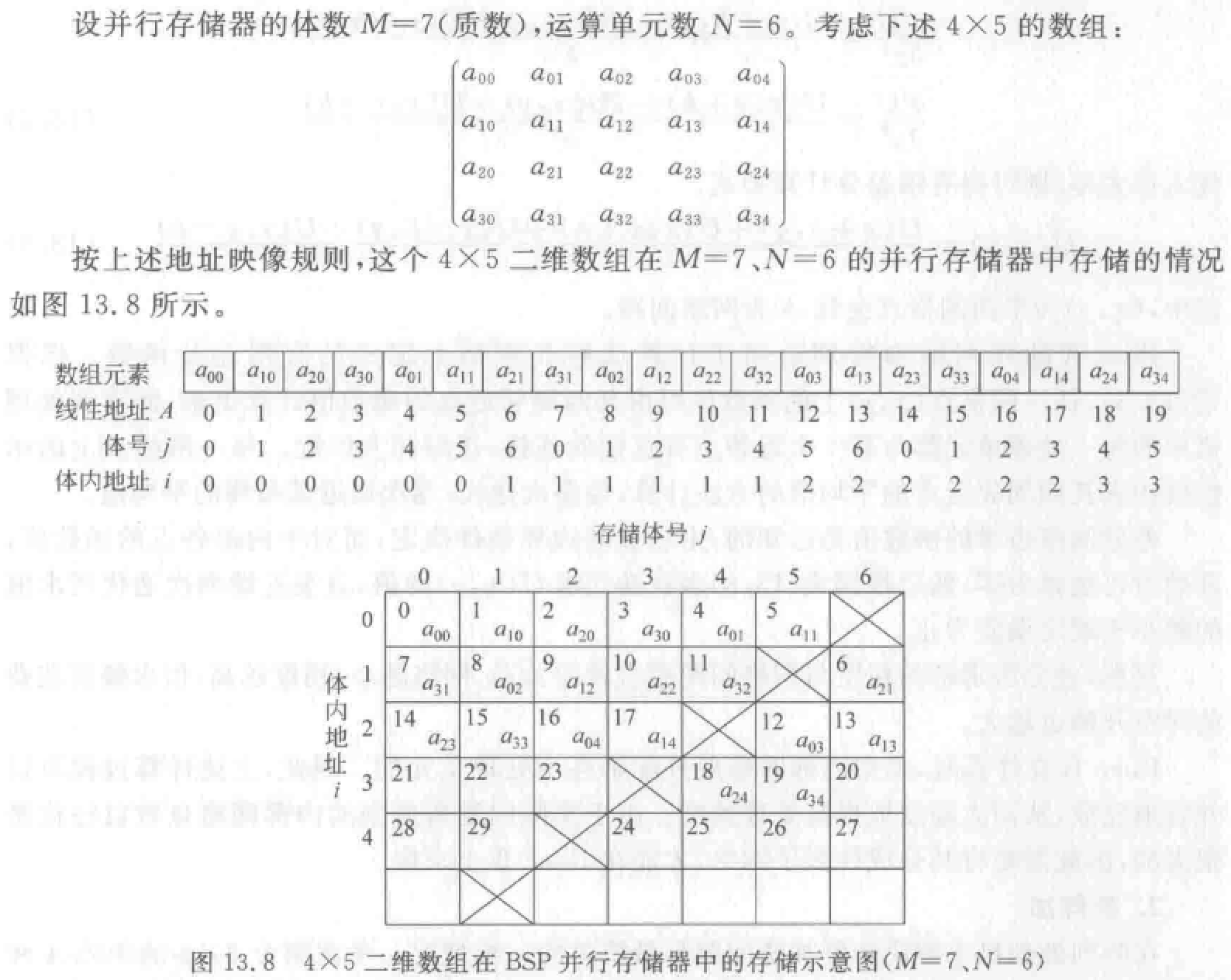
类 BSP 机存储体分配
讨论一台含 \(N\) 个 AE 和 \(M\) 个存储体的类 BSP 机的情况。
- 先将二维数组按列优先或者按行优先的顺序变换为一维数组,以形成一个一维线性地址空间,地址用 \(A\) 表示。
- 然后将地址 \(A\) 变换成并行存储器地址 \((i,j)\)。其中\(j\) 是存储体体号,\(j=A \pmod M\),\(i\) 是在相应存储体内的地址,\(i=\lfloor \frac AN \rfloor\)。存储体的个数 \(M\) 是一个质数。
例题
阵列处理机与流水线向量处理机对比
- 均适合高速数值计算。阵列处理机有固定结构,与一定算法相联系。
- 阵列处理机用大量处理单元对各分量运算,各单元同时进行相同操作,依赖空间并行技术。并行化程度高,潜力大。
- 向量处理机基于流水线技术,时间并行性。
- 阵列处理机每个单元负担多种处理功能,相当于向量机多功能流水部件,处理数据效率较低。
- 互连网络设计和研究——阵列机研发重点。
- 阵列机有一台标量处理机和一台前端机,向量处理部件是系统主体。机器性能主要取决于向量处理部分。也取决于标量运算速度和编译开销。
算法
例题
例:某分布存储器多处理机,8 个处理器立方体网连接,标号为 0 至 7。向量 \(X\) 的 16 个分量分别存放在 8 个 CPU 局部存储,\(X\) 的分量 \(i\) 放在标号为 \(i\) 模 8 的处理器中。标量 \(a\) 放在 0 号处理机中,最终结果 \(S\) 可放在任意处理器。在相邻处理器之间传送一个数据需要 \(2\Delta t\),乘法需要 \(4\Delta t\) ,加法需要 \(1\Delta t\) ,其它操作时间忽略不计。 求\(S=\prod_{i=1}^{15}(X_i+a)\)的最短执行时间。
解:总时间三部分构成:
- 标量 a 广播时间 = \(传送时间 2\Delta t \times 网络直径 3 = 6\Delta t\)
- 阵列处理器处理时间 两次加法一次乘法 = \(2 \times 1\Delta t + 4\Delta t = 6\Delta t\)
- 递归折叠时间 传+乘 传+乘 传+乘 = \(2+4+2+4+2+4 = 18\Delta t\)
总时间:\(6+6+18 = 30 \Delta t\)
在含有一个 PE 的 SISD 机和一个含有 16 个 PE 且连接成的超立方体结构的阵列处理机上计算下列求内积表达式\(S=\sum_{i=0}^{31}(A_i\times B_i)\)
假定每个 PE 完成一次加法需要 \(2\Delta t\),完成一次乘法需要 \(4\Delta t\)。在相邻 PE 之间传送一个数据需要 \(1\Delta t\)。操作数 \(A_i\) 和 \(B_i\) 最初始存放在 \(PE_i\bmod{16}\) 中,其中 \(i=0,1\ldots 31\)。取指令、取操作数、译码和写结果等时间均忽略不计。问:
在 SISD 机上计算 S 时间?
在超立方体结构上计算 S 的时间是多少?
解:
(1)在 SISD 机上计算 s 需要串行计算 32 次乘法和 31 次加法。共需要时间:\(32\times 4\Delta t+31\times 2\Delta t=190\Delta t\)
(2)共有 16 个 PE,每个 PE 各自有 \(A_i\)、\(B_i\) 对两组。
每个 PE 内两次乘法和一次加法用时\(2\times 4\Delta t+1\times 2\Delta t=10\Delta t\)
每次得到立方体传输 PE 并相加用时\(\Delta t+2\Delta t=3\Delta t\)
立方体降到 0 维共需 \(\log_2{16}=4\) 次,用时\(4\times 3\Delta t=12\Delta t\)
总时间\(10\Delta t+12\Delta t=22\Delta t\)
计算机系统结构复习笔记 - 第九、十、十三章